
Appearance
简介
教程
1 环境准备
2 镜像下载安装
- 安装完成docker后,登录纵横私有harbor仓库,输入命令:
docker login harbor.jouav.com - 根据提示输入账号密码,。
- 登陆成功后,拉取镜像,输入命令:
docker pull harbor.jouav.com/open/jocpl:v1.2.1 - 查看镜像下载成功与否,输入命令:
docker images,若镜像列表中存在新拉取的镜像,则代表拉取成功,反之则重新执行前面流程。
3 运行
- 镜像下载完成后,输入命令:
docker run -itd --name jocpl -p 8085:8085 harbor.jouav.com/open/jocpl:v1.2.1,其中端口号映射可根据实际情况调整,若按照该命令,对外暴露端口为8085。 - 查看运行日志,输入命令:
docker logs -f 容器id,若显示以下日志,则运行成功。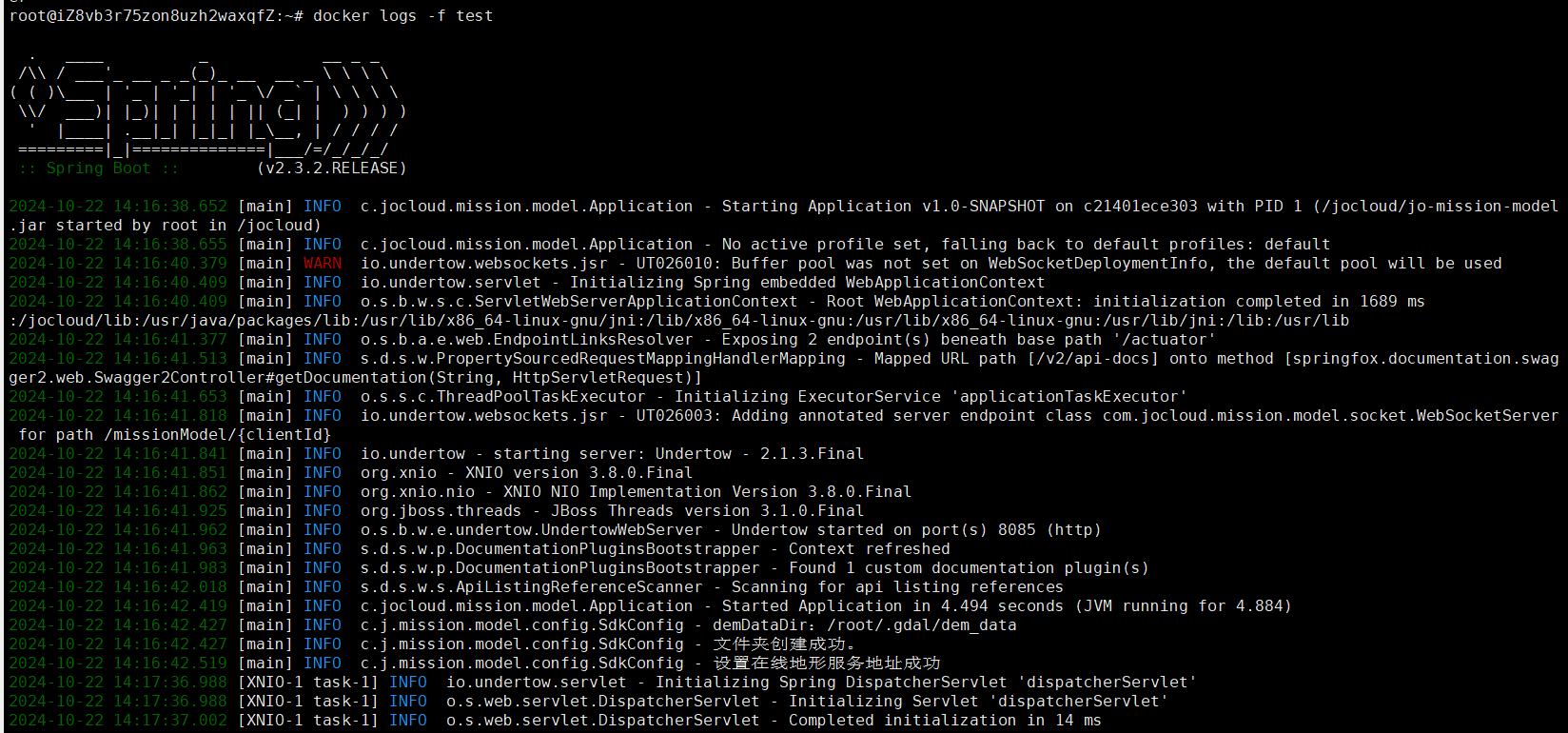
4 接口文档
接口地址: ip+port+/v2/common/addPlan
请求方式:POST
请求数据类型:application/json
响应数据类型:*/*
请求示例:
javascript
{
"homePositionForm": {
"comment": "",
"id": "",
"m": 0,
"orbitRadius": 0,
"x": 0,
"y": 0,
"z": 0
},
"index": 0,
"newProjectForm": {
"commanderId": "",
"comment": "",
"destinationId": "",
"name": "",
"originationId": "",
"performerId": "",
"projectId": ""
},
"planOrderForm": {
"orderComment": "",
"orderId": "",
"orderName": ""
},
"planParamForm": {
"auxiliaryRoute": "",
"destinationForm": {
"comment": "",
"id": "",
"m": 0,
"orbitRadius": 0,
"x": 0,
"y": 0,
"z": 0
},
"isMovingPlat": true,
"originationForm": {
"comment": "",
"id": "",
"m": 0,
"orbitRadius": 0,
"x": 0,
"y": 0,
"z": 0
},
"photoMode": 0,
"planComment": "",
"planName": ""
},
"planSensorParamForm": {
"comment": "",
"focalLength": 0,
"frameX": 0,
"frameXOffset": 0,
"frameXRotation": 0,
"frameY": 0,
"frameYOffset": 0,
"frameYRotation": 0,
"frameZ": 0,
"frameZOffset": 0,
"frameZRotation": 0,
"model": "",
"pixelX": 0,
"pixelY": 0,
"viewAngle": 0
},
"planTargetParamForms": [
{
"adaptiveAltitude": true,
"adaptiveLine": true,
"ascendMax": 0,
"comment": "",
"courseOverlapRatio": 0,
"datumElevation": 0,
"descendMax": 0,
"distanceToBuffer": 0,
"frameworkEnable": true,
"frameworkEndsCount": 0,
"frameworkPairCount": 0,
"frameworkPrior": true,
"frameworkRaisedHeight": 0,
"frontalBearing": 0,
"frontalEntryOffset": 0,
"frontalLeaveOffset": 0,
"groundSampleDistance": 0,
"isLidarEight": true,
"isLidarHighPrecision": true,
"isMapping": true,
"lateralEntryOffset": 0,
"lateralLeaveOffset": 0,
"lateralOverlap": 0,
"orbitRadius": 0,
"orbitTime": 0,
"planMode": 0,
"relativeHeight": 0,
"relativeHeightMin": 0,
"routeSpacing": 0,
"stripeCount": 0,
"targetName": "",
"targetType": "",
"turningRight": true,
"viewAngle": 0,
"waypointAction": 0,
"x": [],
"y": [],
"z": []
}
],
"planVehicleParamForm": {
"ascendLimit": 0,
"ceiling": 0,
"clearance": 0,
"comment": "",
"descendLimit": 0,
"floor": 0,
"minTurnAngle": 0,
"model": "",
"orbitRadius": 0
},
"planner": "",
"saveData": true
}请求参数
| 参数名称 | 参数说明 | 请求类型 | 是否必须 | 数据类型 | schema |
|---|---|---|---|---|---|
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
响应示例
javascript
{
"code": 0,
"data": {
"destinationId": "",
"homeId": "",
"missionPlanParamVO": {
"maxAltitude": 0,
"minAltitude": 0,
"planArea": 0,
"planLength": 0,
"routeCount": 0
},
"orderId": "",
"originationId": "",
"planId": "",
"planJson": "",
"playerId": "",
"projectId": "",
"routeId": "",
"routeJson": "",
"sensorId": "",
"switchEntryPointVO": {
"destination": "",
"orbitRadius": 0,
"origination": ""
},
"targetIds": [],
"targetJson": [],
"vehicleId": ""
},
"msg": "",
"success": true
}