
Appearance
前言
mqtt clientId使用jopc-站点唯一标识, 以下所有消息topic前面都要加上/jopc-站点唯一标识,如站点配置topic:/jopc-站点唯一标识/stationSetting。2.2的更新站点信息除外,其clientId和topic均不需要使用站点唯一标识。
所有消息体均采用json格式;统一结构如下:
| 字段 | 类型 | 备注 |
|---|---|---|
| msgId | string | 当前指令的唯一标识 |
| type | string | request 代表PilotControl接收到的 response 代表PilotControl发送出去的 |
| data | json | |
| code | int | 200成功 400 失败 起飞失败会有具体的错误码,详情见3.2.2.1 |
| msg | string | 接口调用失败时的一些错误消息 |
| id | string | 可为飞控编号之类的 |
以下的所有协议内容都是统一结构的data内容。
飞机未连接之前只会处理2.站点设置里的相关消息,连上飞机之后才会处理其它mqtt消息.
以下文档里的发送、设置等接口默认返回的data都为空,请求接口传过来的data默认都可为空,如果请求接口需要传值会写出来的(如3.2.12)。
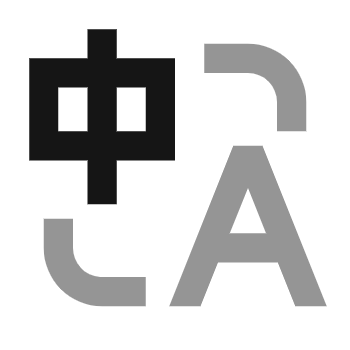
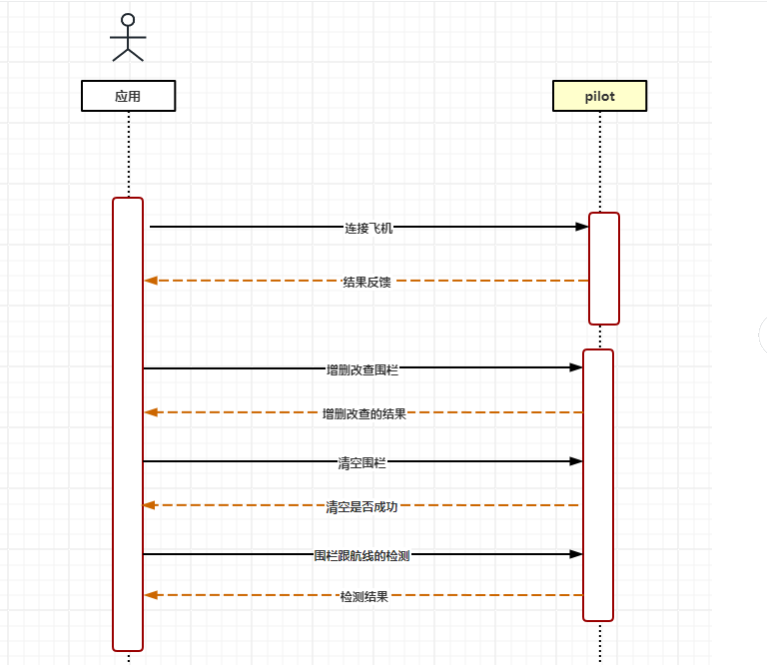
调用时序图
飞行指控模块详细时序图,如下图所示:
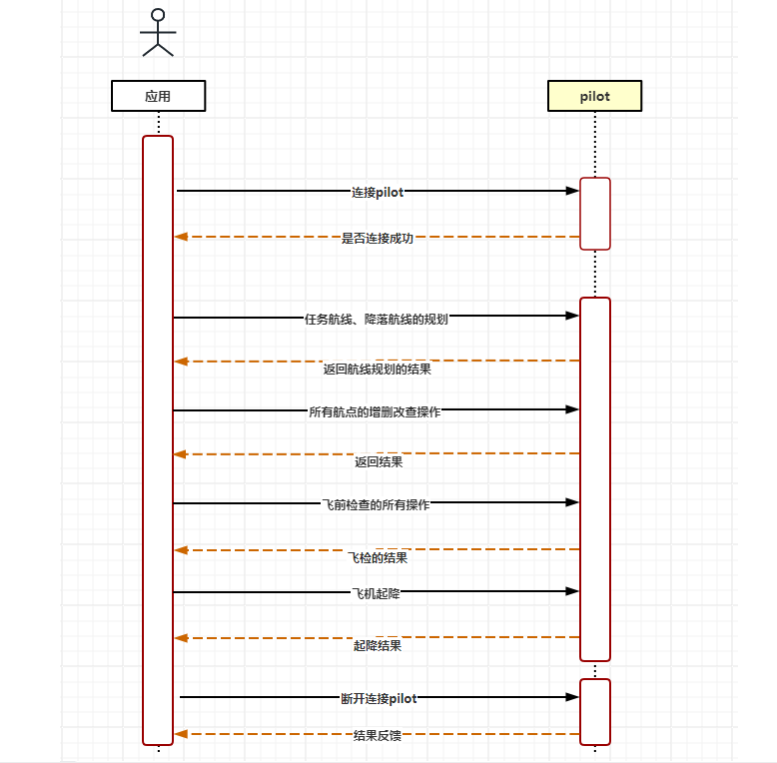
遥测模块详细时序图,如下图所示:
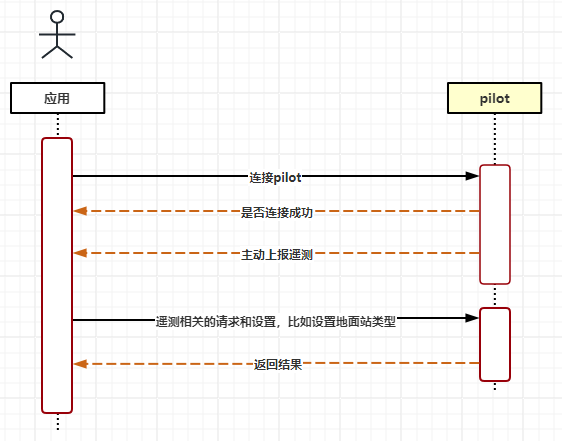
固件更新时序图,如下图所示:
电子围栏时序图,如下图所示:
站点设置
概述
该部分是进行站点配置
更新站点信息
通信:MQTT
主题:/updateStationSetting
内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| stationSN | string | 站点编号 |
说明:该topic不需要站点编号;当收到该信号时,会使用传入的站点编号重启pilot_control;
站点配置
通信:MQTT
主题:/stationSetting
内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| array[json] | ||
| stationSN | string | 站点编号 |
| pilotId | string | 飞控ID |
| vehicleModel | string | 飞机型号, CW_007 CW_10, CW_15, CW_15II, CW_20, CW_25, CW_25E, CW_30, CW_100, PH_25 |
| commType | int | 0-tcp连接,1-udp连接,2-串口通信, 3-网络udp(本地、远端ip) 默认是tcp连接 |
| commIp | string | commsdk连接的基站ip,默认是192.168.1.112,可为空,为空代表这四个comm参数根据joPilotController的配置文件进行连接; 网络udp时代表本地ip |
| commPort | int | commsdk连接的ip端口号,默认是2010 |
| remoteIp | string | 网络udp时远端ip |
| serialPort | string | 串口通信-串口号 |
| baudRate | int | 串口通信-波特率,默认为115200 |
| forwardPort | int | 串口通信-转发端口,默认为-1,不转发 |
| commBigEndian | int | 0-小端,1-大端; 二代飞控(CW15Ⅱ、PH25)是小端,一代飞控大端 |
| connectType | int | 0-自动连接 1-手动连接 |
| pushRouteUrl | string | 发出去的航线url地址(3.2.1的航线地址) |
| hdVideoUrl | string | 高清视频源地址 |
| sdVideoUrl | string | 标清视频源地址 |
| martinIp | string | p30链路,udp组播的ip,默认226.0.0.80 |
| multiMartinIp | string | p30链路指定网卡IP收发udp组播消息 |
| martinRecvPort | int | p30链路,数据接收端口,默认6094 |
| martinSendPort | int | p30链路,数据发送端口,默认6078 |
| waypointMode | int | 航点模式,0为800,1为2048 |
| adapterIp | string | 指定网卡ip |
json
{
"type": "request",
"data": [
{
"pilotId": "9494",
"vehicleModel": "CW_15",
"connectType": 0,
"commIp": "172.30.10.93",
"commPort": 2010,
"commType": 0,
"commBigEndian": 0,
"pushRouteUrl": "http://127.0.0.1:8700/missionCenter/v1/accomplishPlan/updateWaypoint"
}
]
}飞机载荷配置
通信:MQTT
主题:/deviceSetting
内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| pilotId | string | 飞控ID |
| devName | string | 载荷设备名称(Lidar、Camera、Gimbal) |
| devModel | string | 载荷设备型号 |
载荷设备型号
| 单相机 | 五拼相机 | 激光雷达 | 吊舱 |
|---|---|---|---|
| CA102/35mm | JR503 35mm/40mm | JoLiDAR-LR | MG120E |
| CA103/35mm | CA502RC 25mm/35mm | JoLiDAR-LR22S | MG202 |
| iXM-100/35mm | CA502RI 28mm/43mm | JoLiDAR-120 | |
| iXM-100/80mm | CA502RII 30mm/45mm | JoLiDAR-1000 | |
| iXU-RS 1000/50mm | CA503RI 40mm/56mm | JoLiDAR-L1500 | |
| M10/50mm | CA503RII 40mm/56mm | ||
| M10/60mm | CA504R 40mm/56mm | ||
| M10/75mm | CA504RP 40mm/56mm | ||
| M6/40mm | DG3 28mm/40mm | ||
| R4M/40mm | DG4 Pros 40mm/56mm | ||
| R6M/40mm | DG10 75mm/75mm | ||
| DG10 50mm/75mm |
获取串口列表
通信:MQTT
主题:/getSerialNames
内容:
pilot发出去的:
| 字段 | 类型 | 描述 |
|---|---|---|
| portNames | array[string] | 串口列表 |
json
{
"code": 200,
"data": { "portNames": ["COM1"] },
"id": "10850773",
"type": "response"
}连接飞机
通信:MQTT
主题:/pilotConnect
内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| pilotId | string | 飞控ID |
json
{
"type": "request",
"data": {
"pilotId": "3132323"
},
...
}断开与飞机的连接
通信:MQTT
主题:/disconnectPilot
内容:空
站点心跳包
通信:MQTT
主题:/heartBeat
内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| timeStamp | int | 13位格式的时间戳 |
注:心跳包1秒一次
获取站点信息
json
{
"type": "response",
"data": {
"utmiss":{
"uavLat": 31.323223,
"uavLon": 102.232323,...
}
},
"id": "3132323",
...
}基础模块
上报遥测数据
通信方式:mqtt
主题:/pushTelemetry
utmiss
协议内容
| 字段 | 内容 | 类型 | 备注 |
|---|---|---|---|
| uavLat | 飞机纬度 | double | |
| uavLon | 飞机经度 | double | |
| uavHMSL | 飞机海拔高度 | double | |
| uavAlt | 飞机高度 | double | |
| orderId | 飞行记录编号 | string | |
| timeStamp | 时间戳 | double | |
| gs | 飞机实时飞行速度 | double | 飞机实时飞行速度 |
| uavPitch | 飞机俯仰 | double | TELE_FLIGHT_READING_t |
| uavYaw | 飞机偏航 | double | TELE_FLIGHT_READING_t |
| uavRoll | 飞机滚转 | double | TELE_FLIGHT_READING_t |
| gnssHeading | GNSS航向角 | double |
示例数据
json
{
"type": "response",
"data": {
"utmiss":{
"uavLat": 31.323223,
"uavLon": 102.232323,...
}
},
"id": "3132323",
...
}标准数据(standardData)
协议内容
内容:
| 字段 | 内容 | 类型 | 备注 |
|---|---|---|---|
| vGnd | 地速 | double | |
| vNorth | 地速(北) | double | m/s |
| vEast | 地速(东) | double | m/s |
| vDown | 地速(地) | double | m/s |
| numSV | 卫星数 | int | |
| pDOP | GNSS精度 | double | |
| posType | 定位GNSS位置类型 | int | 参考3.1.2.4 |
| tAS | 空速 | double | TELE_FLIGHT_READING_t |
| rPM | 转速 | int | 15II在JESC_Status 25E无转速显示 40在TELE_FLIGHT_READING_t |
| leftRPM | 左发动机转速 | int | |
| rightRPM | 右发动机转速 | int | |
| throttle | 油门指令 | int | MSG_TELEMETRY_CTRLCMD_SUB |
| uavPitch | 飞机俯仰 | double | TELE_FLIGHT_READING_t |
| uavYaw | 飞机偏航 | double | TELE_FLIGHT_READING_t |
| uavRoll | 飞机滚转 | double | TELE_FLIGHT_READING_t |
| mainPowerV | 主电压 | double | |
| mainPowerA | 动力电压 | double | |
| apMode | 飞行状态 | int | 参考飞行状态表 |
| photoNum | 照片反馈数量 | int | PhotoEventNum:15II来自APCamStatus photoNum:一代飞控来自 TELE_SYSTEM_READING_t |
| tracker | 导航点序号 | int | |
| takeOff | 起飞状态 | bool | 0:无法起飞 1:可以起飞 |
| gnssHeading | GNSS航向角 | double | |
| rtkExtSolStat | rtk状态 | double | if(pos_Type == 50 && (rtkExtSolStat & 0x01)>0) 状态为RTK |
| flightDistance | 总飞行距离[Km] | double | 总飞行距离[Km] |
| curFlightTime | 本次飞行时间(hh:mm:ss) | string | |
| assiMode | 遥控器模式 | int | 参照3.1.3.6.2 |
| rssiStatus | 电机状态 | bool | 参照3.1.3.6.3 |
| sbusStatus | 遥控器RC状态 | int | 参照3.1.3.6.4 |
| uavAlt | 相对地面的高度 | double | 离地高度 |
| tx | 通信发包数量 | double | |
| rx | 通信收包数量 | double | |
| magCaliStatus | 磁罗盘校准状态 | int | 0-未校准 1-校准中 2-校准完成 |
| double | |||
| double | |||
| double | |||
| double | |||
| double | |||
| bool | |||
| bool | |||
| bool | |||
| bool | |||
| bool | |||
| camStatus | |||
| camDepth | double | 单位m | |
| windSpeed | 风速 | double | |
| southWind | 南风 | double | |
| westWind | 西风 | double | |
| deviceModel1 | 载荷类型1 | string | |
| deviceModel2 | 载荷类型2 | string | |
| globalStatus | 遥控器状态 | int | 1自驾状态,其它是手动状态 |
飞行状态表
| APV_GROUND_TEST_STATE, | 起飞准备 |
|---|---|
| APV_PRE_LAUNCH_STATE | 待飞 |
| APV_ATT_ASSIST_STATE | 姿态安全 |
| APV_HOVER_ASSIST_STATE | 悬停辅助 |
| APV_LIFT_OFF_STATE | 离地 |
| APV_CLIMB_OUT_STATE | 爬升 |
| APV_ACCELERATE_STATE | 加速 |
| APV_V2L_STATE | 垂转平 |
| APV_FLYING_STATE | 飞行 |
| APV_LANDING_STATE | 降落 |
| APV_DECELERATE_STATE | 减速 |
| APV_L2V_STATE | 平转垂 |
| APV_FINAL_HOVER_STATE | 末端悬停 |
| APV_FINAL_DESCENT_STATE | 末端下降 |
| APV_FORCED_LANDING_STATE | 迫降 |
| APV_AHRS_FORCED_LANDING_STATE | 丢星迫降 |
| APV_SEMI_AUTO_ASSIST_STATE | 半自动 |
| APV_SEMI_AUTO_V2L_STATE | 进半自动 |
| APV_SEMI_AUTO_L2V_STATE | 出半自动 |
| APV_AUTO_HOVER_STATE | 自动悬停 |
| APV_SELF_DESTRUCTION_STATE | 自毁 |
| APV_AIR_MAG_CAL_STATE | 航磁校准 |
| APV_BOMB_ATTACK_STATE | 攻击模式 |
| APV_OBSTACLE_MANEUVER_FORWARD_STATE | 前视避障 |
| APV_JOUAV_SDK_STATE | SDK控制 |
| APV_OBSTACLE_MANEUVER_DOWNWARD_STATE | 下视避障 |
定位状态枚举(位置方案类型)
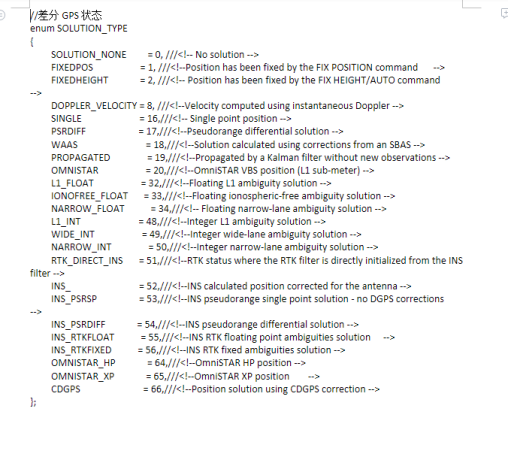
定位GNSS位置类型表
java
switch (posType) {
case 0:
return "SOLUTION_NONE";
case 1:
return "FIXEDPOS";
case 2:
return "FIXEDHEIGHT";
case 8:
return "DOPPLER_VELOCITY";
case 16:
return "SINGLE";
case 17:
return "PSRDIFF";
case 18:
return "WAAS";
case 19:
return "PROPAGATED";
case 20:
return "OMNISTAR";
case 32:
return "L1_FLOAT";
case 33:
return "IONOFREE_FLOAT";
case 34:
return "NARROW_FLOAT";
case 48:
return "L1_INT";
case 49:
return "WIDE_INT";
case 50:
return "NARROW_INT";
case 51:
return "RTK_DIRECT_INS";
case 52:
return "INS_";
case 53:
return "INS_PSRSP";
case 54:
return "INS_PSRDIFF";
case 55:
return "INS_RTKFLOAT";
case 56:
return "INS_RTKFIXED";
case 64:
return "OMNISTAR_HP";
case 65:
return "OMNISTAR_XP";
case 66:
return "CDGNSS";
default:
return "No Fix";
}
}示例数据
json
{
"data":{
"id": ** //飞控Id UINT32
"Telemetry":{
"Year": *** // 0代表2000年 UINT8
"Month" : *** // 1-12 UINT8
"Day" : *** // 1-31 UINT8
"Hour" : *** // 北京时间 UINT8
"Minute" : *** // UINT8
"Second" : *** // UINT8
"UavLat" : *** // 飞机纬度 double
"UavLon" : *** // 飞机经度 double
"UavHMSL" : *** // 飞机高度 double
"VGnd" : *** // 地速 double
"numSV" : *** // 卫星数Int
"pDOP" : *** // GNSS精度 double
"Pos_Type" : *** // 定位GNSS状态 Int
"TAS" : *** // 空速 double
"RPM" : *** // 转速 UINT16
"Throttle" : *** // 油门指令 Int16
"UavPitch" : *** // 飞机俯仰 double
"UavYaw" : *** // 飞机偏航 double
"UavRoll " : *** // 飞机滚转 double
"MainPowerV" : *** // 主电压 Double
"MainPowerA" : *** // 动力电压 Double
"APMode" : *** // 飞行状态 UINT16
"PhotoNum" : *** // 照片反馈数量 UINT16
"Tracker " : *** // 导航点序号 UINT16
"TakeOff ": *** // 起飞状态 bool
}
}
}全部遥测
| 字段 | 类型 | 备注 |
|---|---|---|
| magHeading | string | 姿态角-磁航向 |
| airHeight | double | 大气数据-高度 |
| airSpeed | double | 大气数据-空速 |
| angularVibrate | double | 角速率振动 |
| accVibrate | double | 加速度振动 |
| diffCount | double | 差分计数 |
| engineSpeedLeft | double | 发动机转速-左发 |
| engineSpeedRight | double | 发动机转速-右发 |
| lidarHeight | double | 雷达-高度 |
| alongRoute | double | 导航信息-沿航线 |
| lateralDevia | double | 导航信息-横偏 |
| horDistance | double | 移动平台-水平距离 |
| uploadCount | double | 移动平台-基站上传计数 |
| moveDiffCount | double | 移动平台-差分计数 |
| relaCount | double | 移动平台-相对计数 |
| airRelaStationX | double | 飞机相对基站位置1 |
| airRelaStationY | double | 飞机相对基站位置2 |
| airRelaStationZ | double | 飞机相对基站位置3 |
| airRelaStationHeading | double | 飞机相对基站位置4 |
| movePlatSpeed | double | 移动平台速度 |
| movePlatDirect | double | 移动平台方向 |
| followPoints | array[json] | 伴随航线、降落航线、0号航点数据 |
| 单个json内容 | ||
| lon | double | 经度 |
| lat | double | 纬度 |
| alt | double | 高度 |
| index | int | 当前航点序号 |
| nextIndex | int | 下一航点序号 |
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| gnssHearthStatus | string | GNSS异常错误 |
| 定位差分 | ||
| mainGNSSStatus | int | 启用状态:0故障,1启用 |
| timeStamp | double | 时间戳 |
| gnssFix | UINT8 | 0"No Fix";1"DRO";2"2D Fix";3"3D Fix";4"GNSS+DR" |
| flags | UINT8 | 测向方式:3是GNSS,其它是磁罗盘 |
| uavLat | double | 纬度 |
| uavLon | double | 经度 |
| uavHMSL | double | 海拔高 |
| uavAlt | double | 相对地面的高度 |
| vGnd | double | 地速 |
| vNorth | double | 地速(北),单位m/s |
| vEast | double | |
| vDown | double | 地速(地)/地速(下),单位m/s |
| pDop | double | GNSS精度 |
| gnssDirection | double | 定位差分航向角, |
| rtkPSolStatus | string | 定位差分方案状态,OEMV_STATUS.P_Sol_Status |
| posType | string | 定位差分位置类型,OEMV_STATUS.Pos_Type |
| pxSigma | double | 定位差分X方差,OEMV_STATUS.P_X_Sigma |
| pySigma | double | 定位差分Y方差,OEMV_STATUS.P_Y_Sigma |
| pzSigma | double | 定位差分Z方差,OEMV_STATUS.P_Z_Sigma |
| vzSigma | double | 定位差分Z速度方差,OEMV_STATUS.V_Z_Sigma |
| airTemp | double | 差分计数,TELE_FLIGHT_READING_t.DGNSS_Count |
| numSV | int | 卫星数TELE_GNSS_READING_t.numSV |
| heading | double | 航向[度] |
| 定向差分 | ||
| rtkDirPSolStatus | string | 定向差分方案状态,OEMV_STATUS.P_Sol_Status |
| dirPosType | string | 定向差分位置类型,OEMV_STATUS.Pos_Type |
| dirPxSigma | double | 定向差分X方差,OEMV_STATUS.P_X_Sigma |
| dirPySigma | double | 定向差分Y方差,OEMV_STATUS.P_Y_Sigma |
| dirPzSigma | double | 定向差分Z方差,OEMV_STATUS.P_Z_Sigma |
| dirVzSigma | double | 定向差分Z速度方差,OEMV_STATUS.V_Z_Sigma |
| gnssHeading | double | 定向差分航向角,TELE_GNSS_READING_t.gnssHeading |
| bakGNSSStatus | int | 启用状态:0故障,1启用,OEMV_STATUS.Flag |
| diffModeState | int | 机载差分模式状态:1绿,0红 |
| diffModeText | int | 机载差分模式内容:1固定平台,2移动平台,其它异常 |
| airborneOrienState | int | 机载定向状态:0红,50绿,其它橙 |
| airborneOrienText | string | 机载定向内容 |
| relativeDiffState | int | 相对差分状态:0红,50绿,其它橙 |
| relativeDiffText | string | 相对差分内容 |
| stationOrienState | int | 基站定向状态:0红,50绿,其它橙 |
| stationOrienText | string | 基站定向内容 |
| 相对位置差分 | ||
| rtkRelaPSolStatus | string | 方案状态 |
| relaPosType | string | 位置类型 |
| relaPxSigma | double | X位置标准方差 |
| relaPySigma | double | Y位置标准方差 |
| relaPzSigma | double | Z位置标准方差 |
| relaVzSigma | double | Z速度标准方差 |
| L12Use | string | L1、L2使用 |
| GNSS状态 | ||
| absPosDiff | double | 绝对位置差分 |
| absPosDiffState | int | 绝对位置差分状态:>=1正常,其它异常 |
| relaDiff | double | 相对差分 |
| relaDiffState | int | 相对差分状态:>=1正常,其它异常 |
| pointDiff | double | 双天线指向差分 |
| pointDiffState | int | 双天线指向差分状态:>=1正常,其它异常 |
| uploadCount | double | 基站上传计数 |
| uploadCountState | int | 基站上传计数状态:>=1正常,其它异常 |
示例数据
json
{
"type": "response",
"data": {
"gnssInfo":{
"gnssHearthStatus": "",
"mainGNSSStatus": 0, ...
}
},
"id": "3132323",
...
}传感器(sensor)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| 综合信息 | ||
| height | double | 高度 |
| airHeight | double | 气压高,TELE_FLIGHT_READING_t.airHeight |
| groundSpeed | double | 地速 |
| 风速[m/s] | ||
| windSpeed | double | 风速,TELE_FLIGHT_READING_t.southWind, TELE_FLIGHT_READING_t.westWind |
| southWind | double | 南风,TELE_FLIGHT_READING_t.southWind |
| westWind | double | 西风,TELE_FLIGHT_READING_t.westWind |
| 姿态[度] | ||
| pitch | double | 俯仰,TELE_FLIGHT_READING_t.Pitch |
| roll | double | 翻滚,TELE_FLIGHT_READING_t.Roll |
| yaw | double | 偏航,TELE_FLIGHT_READING_t.Yaw |
| 航向传感器[度] | ||
| gnssHeading | double | GNSS航向 |
| magHeading | double | 主罗盘差、磁航向 |
| magBackHeading | double | 备罗盘差 |
| 系统 | ||
| boardTemp | double | 温度 |
| staticPress | double | 静压 |
| dynPress | double | 动压 |
| backupDynPress | double | 备份动压 |
| 磁传感器[mGauss] | ||
| magX | string | X轴 |
| magY | string | Y轴 |
| magZ | string | Z轴 |
| exMag | int | 有无配置外置磁罗盘协议 0-内置 1-外置 |
| exMagBak | int | 外置磁罗盘失效,失效为1,正常为0 0-主罗盘 1-备份罗盘 |
| 角速度[deg/s] | ||
| gyroY | double | 俯仰 |
| gyroX | double | 翻滚 |
| gyroZ | double | 偏航 |
| 角速度偏差[deg/s] | ||
| gyroBiasY | double | 俯仰 |
| gyroBiasX | double | 翻滚 |
| gyroBiasZ | double | 偏航 |
| 体轴加速度[m/s/s] | ||
| accX | double | X轴 |
| accY | double | Y轴 |
| accZ | double | Z轴 |
| 加速度偏差[deg/s] | ||
| accBiasX | double | X轴 |
| accBiasY | double | Y轴 |
| accBiasZ | double | Z轴 |
| 备份外置气压计[Pa] | ||
| bakStaticPress | double | 静压 |
| bakStaticPressDiff | double | 静压偏差 |
| bakDynPress | double | 动压 |
| bakDynPressDiff | double | 动压偏差 |
| 空速管加热 | ||
| pitotNoseTemp | double | 管头(°C) |
| pitotBodyTemp | double | 管体(°C) |
| pitotheatPower | double | 功率(%) |
| pitotFlags | double | 工作状态 |
| 磁罗盘检查 | ||
| magDeviation | double | 磁航向偏差 |
| yawDeviation | double | 偏航偏差 |
示例数据
json
{
"type": "response",
"data": {
"sensor":{
"height": 500,
"windSpeed": 10, ...
"pitotNoseTemp": 10,
},
},
"id": "3132323",
...
}导航详情(navigationDetails)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| 状态指示 | ||
| lmtStatusTAS | int | 空速,1正常,0异常 |
| lmtStatusALT | int | 高度,1正常,0异常 |
| lmtStatusBank | int | 姿态,1正常,0异常 |
| lmtStatusGNSS | int | GNSS,2提示,1正常,0异常 |
| lmtStatusComm | int | 通讯,1正常,0异常 |
| lmtStatusFlyStatus | int | 飞行状态的显示文字,除了正常飞行,其它都属于异常,参考3.1.3.3.3 |
| lmtStatusAPStatus | int | 参考2.1.2.2飞行状态表 |
| lmtStatusNavStatus | int | 导航状态,1正常,0异常 |
| 导航信息 | ||
| lbFlightDistance | double | 总飞行距离[Km] |
| lbTrackCrossPos | double | 横偏距[m] |
| lbTrackAlongVel | double | 延航线速度[m/s] |
| lbTrackCrossVel | double | 横偏速度[m/s] |
| 航点信息 | ||
| lbEmergincyIndex | int | 应急点序号 |
| lbEmergincyDist | int | 距应急点距离[m] |
| lbNextPoint | int | 下一航点 |
| lbNextDist | int | 距下一点距离[m] |
| lbNextTime | int | 预计到达时间[s] |
| ctlLoopArray | array[json] | 控制回路 |
| 单个json的数据 | ||
| 遥测值(double) | 状态(string) | 指令值(double) |
| telemeValue | status | cmdValue |
| telemeValue | status | cmdValue |
| telemeValue | status | cmdValue |
| telemeValue | status | cmdValue |
| telemeValue | status | cmdValue |
| telemeValue | status | cmdValue |
控制回路示例
json
{{"name":1,"telemeValue":0.5,"status":"ON","cmdValue":0.24},
{"name":2,"telemeValue":0.5,"status":"ON","cmdValue":0.24},
{"name":3,"telemeValue":0.5,"status":"OFF","cmdValue":0.24},
{"name":4,"telemeValue":0.5,"status":"OFF","cmdValue":0.24},
{"name":5,"telemeValue":0.5,"status":"AUTO","cmdValue":0.24},
{"name":6,"telemeValue":0.5,"status":"AUTO","cmdValue":0.24}}飞行状态的文字表
| 航向 |
|---|
| 倾角[deg] |
| 高度 |
| 垂直速度 |
| 真空速 |
| 襟翼[deg] |
| 地速 |
| 地速方向[deg] |
| 高度 |
| 滚转[deg] |
| 俯仰[deg] |
| 偏航[deg] |
电源(battery)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| mainBattery | double | 主电源 |
| powerBatteryL | double | 动力电源左 |
| powerBatteryR | double | 动力电源右 |
| rotorBattery | double | 舵机电源 |
| 智能电池状态 | ||
| installState | int | 安装状态:1正常,0异常 |
| inerTeleState | int | 内部通信:1正常,0超时 |
| hitPipeState | int | 加热管:1开启,0关闭 |
| autoHitState | int | 自动加热:1加热,0关闭 |
| 智能电池温度 | ||
| temperature | double | 电芯[℃] |
| workPlate | double | 工作板[℃] |
| hitPlate | double | 加热片[℃] |
| 智能电池容量 | ||
| fullCapacity | double | 电池容量[Ah] |
| remainCapacity | double | 剩余容量[Ah] |
| qmaxpassedq | double | 库伦计量[Ah] |
| voltege | double | 电池电压[V] |
| gridnumber | int | 放电深度[%] |
| statetime | int | 放电时间[S] |
| current | double | 电池电流[A] |
| avecurrent | double | 平均电流[A] |
| averagePower | double | 平均功耗[W] |
| cycleCount | int | 容量放电次数 |
| chargingCount | int | 充放电次数 |
| 智能电池电芯电压 | ||
| cell1 | double | 电芯1[V] |
| cell2 | double | 电芯2[V] |
| cell3 | double | 电芯3[V] |
| cell4 | double | 电芯4[V] |
| cell5 | double | 电芯5[V] |
| cell6 | double | 电芯6[V] |
| cell7 | double | 电芯7[V] |
| cell8 | double | 电芯8[V] |
| cell9 | double | 电芯9[V] |
| cell10 | double | 电芯10[V] |
| cell11 | double | 电芯11[V] |
| cell12 | double | 电芯12[V] |
| 智能电池版本 | ||
| softVer | string | 软件版本 |
| hardVer | string | 硬件版本 |
| batteryId | string | 电池ID |
| interNum | int | 内部代号 |
| 动力电源电池加热状态 | ||
| batteryHeatState | array[json] | 依次为左前、右前、左后、右后 |
| 单个json的内容 | ||
| voltage | float | 电池电压 |
| temperature | float | 电池温度:>=15&&<=55是绿色,>=5&&<15是橙色,否则是红色 |
| heatState | int | 加热状态:1加热中,其它停止 |
| heatMode | int | 加热模式:1自动加热,2手动加热,其它未知 |
示例数据
json
{
"type": "response",
"data": {
"battery":{
"mainBattery": 500,...
"installState": 1, ...
"temperature": 10, ...
},
},
"id": "3132323",
...
}执行机构信息(actuatorInfo)
内容
| 电调信息(elecTunInfo) | |||
|---|---|---|---|
| 电调名称 | 电调状态(bool) | 油门值(double) | 转速(int) |
| 右前(rightFront) | state:true异常,false正常 | pwmCmd | rpm |
| 左前(leftFront) | state:true异常,false正常 | pwmCmd | rpm |
| 左后(leftBack) | state:true异常,false正常 | pwmCmd | rpm |
| 右后(rightBack) | state:true异常,false正常 | pwmCmd | rpm |
| 前拉(frontPull) | state:true异常,false正常 | pwmCmd | rpm |
| 舵机信息(steerEngineInfo) | |||
| 舵机名称 | 舵机状态(bool) | 指令值(double) | 反馈值(double) |
| 左副翼(leftAileron) | state:true正常,false异常 | angCmd | feedBack |
| 右副翼(rightAileron) | state:true正常,false异常 | angCmd | feedBack |
| 升降舵(elevator) | state:true正常,false异常 | angCmd | feedBack |
| 方向舵(rudder) | state:true正常,false异常 | angCmd | feedBack |
示例数据
json
{
"type": "response",
"data": {
"actuatorInfo":{
"rightFront":{"state":true,"pwmCmd":80.5,"rpm":2200} ,
"leftFront":{"state":true,"pwmCmd":80.5,"rpm":2200},
"leftBack":{"state":true,"pwmCmd":80.5,"rpm":2200},
"rightBack":{"state":true,"pwmCmd":80.5,"rpm":2200},
"frontPull":{"state":true,"pwmCmd":80.5,"rpm":2200},
"leftAileron":{"state":true,"angCmd":80.5,"feedBack":50.5},
"rightAileron":{"state":true,"angCmd":80.5,"feedBack":50.5},
"elevator":{"state":true,"angCmd":80.5,"feedBack":50.5},
"rudder":{"state":true,"angCmd":80.5,"feedBack":50.5}
},
},
"id": "3132323",
...
}遥控器遥测信息(rcInfo)
在遥控器相关界面在请求遥控器遥测信息,离开遥控器界面就不请求该遥测
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| assiMode | int | 遥控器模式 |
| rssiStatus | bool | 电机状态 |
| sbusStatus | int | 遥控器RC状态 |
| rcAileron | int | 副翼 |
| rcElevator | int | 升降 |
| rcThrottle | int | 油门 |
| rcHeading | int | 航向 |
| globalStatus | int | 1自驾状态,其它是手动状态 |
遥控器模式
cpp
enum class APilotStates
{
AP_MA_NONE, //姿态模式;状态提示
AP_MA_STEERING, //GNSS模式;状态提示
AP_MA_VERTICAL, //自动模式;状态正常
AP_MA_FULL_AUTHORITY, //半自主;状态提示
AP_MA_GIMBAL_STEERING,//云台操作;状态提示
NUM_AP_MA_STATES
};电机状态
java
if(rssiStatus){
//"电机解锁";状态正常
} else {
//"电机锁定";状态正常
}遥控器RC状态
java
enum class SUBS_SINGAL_STATUS
{
SBUS_SIGNAL_OK = 0x00,//RC 正常,状态正常
SBUS_SIGNAL_LOST = 0x01,//RC 断开,状态提示
SBUS_SIGNAL_FAILSAFE = 0x03,//RC 保护,状态提示
JO_SBUS_SIGNAL_PAIR = 0x04,//SBUS校准,状态提示
};根据后四个数据计算遥控器左右两个焦点
java
if(remoterModelIndex ==1){
hotPointSource[0].xPos = (rcHeading-1103) / (1929-1103)
hotPointSource[0].yPos = (rcElevator-1103) / (1929-1103)
hotPointSource[1].xPos = (rcAileron-1103)/ (1929-1103)
hotPointSource[1].yPos = (rcThrottle-1103)/ (1929-1103)
}else if(remoterModelIndex ==2){
hotPointSource[0].xPos = (rcHeading-1103) / (1929-1103)
hotPointSource[0].yPos = (rcThrottle-1103) / (1929-1103)
hotPointSource[1].xPos = (rcAileron-1103)/ (1929-1103)
hotPointSource[1].yPos = (rcElevator-1103)/ (1929-1103)
}else if(remoterModelIndex ==3){
hotPointSource[0].xPos = (rcAileron-1103) / (1929-1103)
hotPointSource[0].yPos = (rcElevator-1103) / (1929-1103)
hotPointSource[1].xPos = (rcHeading-1103)/ (1929-1103)
hotPointSource[1].yPos = (rcThrottle-1103)/ (1929-1103)
}
hotPointSource[0].xPos = (hotPointSource[0].xPos - 0.5)*0.6+0.5
hotPointSource[0].yPos = (hotPointSource[0].yPos - 0.5)*0.4+0.5
hotPointSource[1].xPos = (hotPointSource[1].xPos - 0.5)*0.6+0.5
hotPointSource[1].yPos = (hotPointSource[1].yPos - 0.5)*0.4+0.5
//range protection
if(hotPointSource[0].xPos>1.0)
hotPointSource[0].xPos = 1.0;
else if(hotPointSource[0].yPos>1.0)
hotPointSource[0].yPos = 1.0;
else if(hotPointSource[1].xPos>1.0)
hotPointSource[1].xPos = 1.0;
else if(hotPointSource[1].yPos>1.0)
hotPointSource[1].yPos = 1.0;
图标的位置
//icon-小圆点
Rectangle{
height:root.iconSize
width:root.iconSize
color:root.iconColor
x:(iconX)*parent.width-width/2
y:(1-iconY)*parent.height-height/2
radius: width/2
}吊舱遥测信息(gimbalInfo)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| 机载 | ||
| airLon | double | 经度 |
| airLat | double | 纬度 |
| airAlt | int | 高度 |
| 目标 | ||
| targetLon | double | 经度 |
| targetLat | double | 纬度 |
| targetAlt | int | 高度 |
| 状态指示 | ||
| globalTrack | int | 全局跟踪 1-跟踪打开 其他-启动跟随 |
| pointsTack | int | 定点跟踪 1-定点巡视中 2-路径跟踪中 |
| currentTrack | int | 当前跟踪 |
| 云台角度 | ||
| framePitch | double | 框架俯仰 |
| frameYaw | double | 框架偏航 |
| gimbalFOV | double | FOV |
| 吊舱自动航线相关遥测(793点) | ||
| autoPlanFlag | int | 自主航线飞行计划是否更新标志(1为更新,0不更新) |
| autoPlanLat | double | 吊舱自动航线纬度 |
| autoPlanLon | double | 吊舱自动航线经度 |
| autoPlanAlt | double | 吊舱自动航线高度 |
| autoPlanRadius | double | 吊舱自动航线盘旋半径 |
| autoPlanDirection | int | 吊舱自动航线盘旋方向, 1右盘旋,0左盘旋 |
| autoPlanIndex | int | 吊舱自动航线当前index |
| autoPlanNextIndex | int | 吊舱自动航线当前nextindex |
示例数据
json
{
"type": "response",
"data": {
"gimbalInfo":{
"airLon": 50.233230,...
"targetLon": 49.454445, ...
"globalTrack": 10, ...
},
},
"id": "3132323",
...
}系统信息(systemInfo)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| 系统详情 | ||
| sysTime | string | 系统运行时间(hh:mm:ss) |
| curFlightTime | string | 本次飞行时间(hh:mm:ss) |
| recordStatus | int | 记录仪状态 |
| paramLock | bool | 参数锁定状态 |
| flightNumberStr | string | 总飞行架次数 |
| 系统版本 | ||
| targetLon | double | 经度 |
| targetLat | double | 纬度 |
| targetAlt | int | 高度 |
| countTime | string | 总飞行时间 |
| licenseInfo | string | 授权状态 |
记录仪状态
cpp
switch(recordStatus){
case 0://停止记录,状态异常
case 1://正在记录,状态正常
case 2://下载记录,状态正常
case 3://结束记录,状态正常
case 4://下载最后飞行记录,状态正常
default://记录错误,状态异常
}参数锁定状态
java
if(paramLock){
//"锁定";状态提示
} else {
//"未锁定";状态异常
}地面基站(groundStation)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| gcsName | string | 基站名字,GCS1000,GCS202 |
| gcsTime | double | 时间戳 |
| gcsGNSSFix | int | GNSS状态 |
| gcsLon | double | 经度 |
| gcsLat | double | 纬度 |
| gcsAlt | double | 高度 |
| gcsPDOP | double | pDop |
| gcsNumSV | int | 卫星数,以下三种卫星数之和 |
| gcsGPS | int | GPS |
| gcsGLONASS | int | GLONASS |
| gcsBEIDOU | int | 北斗卫星数,GCS1000才会有这个数据 |
| tx | float | 通信发包数量 |
| rx | float | 通信收包数量 |
| imuPitch | float | IMU的俯仰 |
| imuRoll | float | IMU的滚转 |
| imuYaw | float | IMU的航向 |
| vNorth | float | 地速北 |
| vEast | float | 地速东 |
| vDown | float | 地速地 |
| movePlatSpeed | float | 移动平台速度 |
| movePlatSpeedDirect | float | 移动平台速度方向 |
| movePlatDirect | float | 移动平台方向 |
| mainPowerV | float | 基站电源状态-电压 |
| mainPowerA | float | 基站电源状态-电流 |
| mainPowerGPRS | int | 基站电源状态-GPRS状态:1是ok,其它是stop |
| mainPowerInStorage | int | 基站电源状态-内置存储状态:1是ok,其它是error |
| diffCount | float | 差分计数 |
| relaCount | float | 相对计数 |
| uploadCount | float | 基站上传计数 |
| directDiffNorth | float | 测向差分GNSS偏移-北 |
| directDiffEast | float | 测向差分GNSS偏移-东 |
| directDiffAlt | float | 测向差分GNSS偏移-高 |
| directDiffDirect | float | 测向差分GNSS偏移-方向 |
| directDiffDist | float | 测向差分GNSS偏移-距离 |
| directDiffGNSS | float | 测向差分GNSS偏移-差分GNSS状态 |
| directDiffRTK | string | 测向差分GNSS偏移-RTK模式 |
注:tx、rx信号强度计算:
cpp
int signalStrength = 0;
if(tx != 0){
signalStrength = rx * 1.0 / tx;
if(signalStrength > 1.0){
signalStrength = 1.0;
}
}
Math.round(signalStrength / 0.25)GCS1000的GNSS状态表
cpp
switch(gcsGNSSFix){
case 1://"Fix"
default://"No Fix"
}GCS202的GNSS状态表
cpp
switch(gcsGNSSFix){
case 0://"通信初始化"
case 1://"定位中"
case 2://"锁定"
case 3://"失锁"
default://"未知"
}移动基站的GNSS状态表
cpp
switch (gcsGNSSFix)
{
case 0x01:
showGPSFix.Text = "DRO";
break;
case 0x02:
showGPSFix.Text = "2D Fix";
break;
case 0x03:
showGPSFix.Text = "3D Fix";
break;
case 0x04:
showGPSFix.Text = "GPS+DR";
break;
default:
showGPSFix.Text = "No Fix";
break;
}示例数据
json
{
"type": "response",
"data": {
"groundStation":{
"gcsTime": "",...
"gcsGNSSFix": 1, ...
}
},
"id": "3132323",
...
}链路(link)
简要内容
| 链路通讯状态 | |||
|---|---|---|---|
| 链路名称 | 类型 | 备注 | |
| UHF链(UHFLink) | linkState | bool | 链路状态,true 正常false 断链 |
| upLinkCnt | int | TX | |
| downLinkCnt | int | RX | |
| L频段(LLink) | linkState | bool | 链路状态,true 正常false 断链 |
| upLinkCnt | int | TX | |
| downLinkCnt | int | RX | |
| 链路信息 | |||
| 字段 | 类型 | 备注 | |
| curLinkMode | int | 当前链路模式算法在3.1.3.10.1.2 | |
| UHF链路 | |||
| linkState | bool | 通讯状态,跟链路状态同字段 | |
| linkCnt | int | 收发包,TX+RX | |
| 链路状态 | |||
| devNo | string | 设备型号 | |
| angel | double | 角度[deg] | |
| centerFrequency | int | 中心频点[MHZ] | |
| pBoundary | string | 频点边界[MHZ] | |
| workBw | int | 工作宽带[MHZ] | |
| workChannel | int | 工作频道 | |
| uplinkSpeed | int | 上行速度 | |
| downlinkSpeed | int | 下行速度[Kbps] | |
| wirelessDis | double | 无线测距[Kbps] | |
| 链路机载端(linkAir) | |||
| devTemperature | double | 设备温度[°C] | |
| thermalSwitch | bool | true-机载端温控开 | |
| sendHZ | int | 发射频率[dBm] | |
| gnssSync | bool | GNSS时钟同步:true:GNSS时钟同步;false:自体时钟同步 | |
| downSync | bool | 下行同步:true同步;false未同步 | |
| receANT1 | int | ANT1接受电平[dBm] | |
| receANT2 | int | ANT2接受电平[dBm] | |
| airborneNoise | int | 机载底噪[dBm] | |
| receErrRate | int | 接收误码率[%] | |
| powerSwitchState | bool | 功控:true开;false关 | |
| afs | bool | AFS:true开;false关 | |
| dfs | bool | DFS:true开;false关 | |
| mfs | bool | MFS:true开;false关 | |
| extendedRange | int | 机载增程[dBm] | |
| 链路地面端(linkGround) | |||
| devTemperature | double | 设备温度[°C] | |
| thermalSwitch | bool | true-地面端温控开 | |
| sendHZ | int | 发射频率[dBm] | |
| gnssSync | bool | GNSS时钟同步:true:GNSS时钟同步;false:自体时钟同步 | |
| downSync | bool | 下行同步:true同步;false未同步 | |
| receANT1 | int | ANT1接受电平[dBm] | |
| receANT2 | int | ANT2接受电平[dBm] | |
| groundNoise | int | 地面底噪[dBm] | |
| receErrRate | int | 接收误码率[%] | |
| powerSwitchState | bool | 功控:true开;false关 | |
| afs | bool | AFS:true开;false关 | |
| dfs | bool | DFS:true开;false关 | |
| mfs | bool | MFS:true开;false关 | |
| extendedRange | int | 地面增程[dBm] | |
| snr | int | 信噪比(SNR)[db] | |
| 链路测向测距(linkMeaDis) | |||
| wirelessValue | double | 天线测距[Km] | |
| meaDirDirect | double | 测向航向[°] = 输入的天线航线值 + 测向偏角(meaDirAngel) | |
| theoreticalDis | double | 理论距离[Km] | |
| comDirect | double | 计算航向[°] | |
| rangeErr | double | 测距偏差[Km] | |
| angelErr | double | 测角偏差[°] = meaDirDirect - comDirect | |
| meaDirAngel | double | 测向偏角[°] |
示例数据
json
{
"type": "response",
"data": {
"link":{
"UHFLink" :{"linkState":true,"TX":1,"RX":2},
"LLink": {"linkState":false,"TX":1,"RX":2},
"curLinkMode": "自动/主",
...
},
}
"id": "3132323",
...
}链路模式示例
cpp
//详细信息
std::string activeRadio = "--" ;
switch (curLinkMode>> 4 & 0x3) {
case 1:
activeRadio = "自动";
break;
case 2:
activeRadio = "UHF链";
break;
case 3:
activeRadio = "L频段";
break;
}
std::string useRadio = "";
switch (curLinkMode & 0x3) {
case 1:
//UHF链路
useRadio = "/主";
break;
case 2:
//L频段
useRadio = "/备";
break;
}
string linkmodeStr = activeRadio + useRadio;搜寻链路 (searchLink)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| 选择链路类型:1自动切换, | ||
| bitErrorCount | ||
| errOccurCount | ||
| bitErrorCount | ||
| errOccurCount | ||
| bitErrorCount | ||
| errOccurCount | ||
| bitErrorCount | ||
| errOccurCount | ||
智能避障(smartObstacleAvoidance)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
CAN相关 (can)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
ADS-B遥测信息 (adsb)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
二代飞控相机遥测(camera)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| photoRetNum | int | 拍照触发数 |
| photoCmdNum | int | 拍照命令数 |
| photoFlag | int | 拍照状态,1拍照,0不拍照 |
| timeoutNum | int | 拍照超时数量;photoFlag为1,timeoutNum大于0,前两个字段红色预警 |
一代雷达遥测(lidarV1)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| imuStatus | int | IMU工作状态 1:workding, 2:stop 3:idle |
| lidarStatus | int | 1:workding, 2:stop 3:idle |
| mmcStatus | int | MMC工作状态1:working,2:stop,3:idle |
| imuDeviceType | int | 设备型号 |
| imuCaliStatus | int | 校准状态 0:action finished 1:action doing |
| fineStatus | int | Fine状态 1:fine finished(GNSS时间同步完成) 0:fine doing |
| imuGap | int | IMU gap(gap time threshold : 0.05),0 ~no gap, 1 ~gap |
| lidarTemperature | int | 设备温度(度) |
| lidarFrequency | int | 雷达频率0:50Hz, 1:100Hz,2:200Hz,3:400Hz,4:600Hz, 5:820Hz |
| imuPacketSpeed | int | IMU数据包存储速度 K/second |
| gnssPacketSpeed | int | GNSS数据包存储速度 K/second |
| mmcSize | int | MMC剩余存储空间大小GB |
| lidarPacketSpeed | int | 雷达数据包存储速度(单位:K/second) |
| imuON | int | IMU开启过标志,1-开启过;0-未开启 |
| gnssON | int | GNSS开启过标志,1-开启过;0-未开启 |
| lidarON | int | LiDAR开启过标志,1-开启过;0-未开启 |
| gnssNum | int | 定位卫星数 |
| countPackage | int | lidar计数包 |
二代雷达遥测(lidarV2)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| lidarType | int | 0x00:LR22S(南方测绘) 0x01:120(中测瑞格) 0x02:L1500(珞珈依云) 0x04:300p(奥伦达) |
| shutdownStatus | int | 系统关机状态0:获取不到数据1:OK/2:NO |
| posStatus | int | POS 存储状态 0:获取不到数据1:OPEN/2:CLOSE |
| lidarStatus | int | 激光存储状态0:获取不到数据1:OPEN/2:CLOSE |
| cameraStatus | int | 相机拍照状态0:获取不到数据1:OPEN/2:CLOSE |
| scannerConnStatus | int | 扫描仪连接状态0:获取不到数据1:OK/2:NO |
| boardStatus | int | 板卡状态0:获取不到数据 1:normal/2: error |
| imuSync | int | imu 同步 0:获取不到数据1:Locked/2: Unlocked |
| laserSync | int | 激光时间同步状态0:获取不到数据 1:Locked/2: Unlocked |
| lidarRTKStatus | int | 0:获取不到数据1:无RTK状态, 2:单点定位, 3:伪距差分4:浮点解, 5:固定解 |
| ins | int | 组合导航状态(待定) |
| lon | double | 经度 |
| lat | double | 纬度 |
| alt | double | 高度 |
| satellitesNum | double | 当前使用卫星数 |
| totalSize | double | 内部存储总容量(单位:GB) |
| usedSize | double | 内部存储已使用容量(单位:GB) |
| lidarTotalSize | double | 激光存储总容量(单位:GB) |
| lidarUsedSize | double | 激光存储已使用容量(单位:GB) |
| systemTemperature | double | 激光系统温度单位度 |
| systemVoltage | double | 激光系统电压单位V |
| actualFrequency | double | 激光当前实际频率单位KHZ |
| fov | double | 激光当前实际扫描角度单位deg |
| lineSpeed | double | 激光当前扫描线每秒速度单位线/秒 |
| cmdCnt | int | 相机触发指令数量 |
| retCnt | int | 相机拍照数量 |
控制指令数据 (controlData)
内容
| 电机(PH_25-6个电机,其他机型只要前四个) | ||
|---|---|---|
| motor1 | double | 右前电机脉宽 |
| motor2 | double | 左前电机脉宽 |
| motor3 | double | PH_25-左电机脉宽,除了PH_25-左后电机 |
| motor4 | double | PH_25-左后电机脉宽,除了PH_25-右后电机 |
| motor5 | double | PH_25-右后电机脉宽 |
| motor6 | double | PH_25-右电机脉宽 |
| 固定翼 | ||
| currentAileron | double | 副翼 |
| currentELevator | double | 升降 |
| currentThrottle | double | 油门 |
| currentRudder | double | 方向 |
| 遥控器杆量 | ||
| manualAileron | double | 副翼 |
| manualElvator | double | 升降 |
| manualThrottle | double | 油门 |
| manualRudder | double | 方向 |
发动机遥测(ecuInfo)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| engineStatus | int | 发动机状态 0-关 1-启动中 2-开 |
| motorSpeed | double | 发动机转速,单位:RPM |
| intakePressure1 | double | 进气压力1, 单位:pa |
| intakePressure2 | double | 进气压力2, 单位:pa |
| cylinderTemp | double | 缸温,单位:℃ |
| servPowerA | double | 当前电压,单位V |
| heavyOilHeatState | int | 重油加热状态,1加热,其它未加热 |
| oxygenSensor1 | int | 氧传感器1,单位:mv |
| oxygenSensor2 | int | 氧传感器2,单位:mv |
| oxygenModify1 | int | 氧修正量1,无单位 |
| oxygenModify2 | int | 氧修正量2,无单位 |
| ecuVoltage | double | ECU电压,单位V |
| tempModify | double | 温度修正量 |
| fuelCharge | int | 喷油量 |
| currentDTCNum | int | 当前DCT个数 |
| currentDTC1 | int | |
| currentDTC2 | int | |
| currentDTC3 | int | |
| oilOutTimeStatus | bool | 机油是否过期 true-是 |
发动机油量计算方法
(servPowerA - oilOffset) / (oilMax - oilOffset)*100;
oilOffset、oilMax 为3.3.4.8、3.3.4.9获取、设置的空油、满油参数
转塔1遥测(turret1Info)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| wkMod | int | 转塔工作模式 0x01 GNSS跟踪模式 0x02手动操作 0x03 角度定位模式 0x04 转台停止 除了以上值以外都表示未知 |
| wkStatus | int | 工作状态 0x01 撤收 0x02工作 除了以上值以外都表示未知 |
| panCmd | double | 俯仰角指令值 - 相对转塔 |
| panTel | double | 俯仰角遥测值 - 相对转塔 |
| headingCmd | double | 航向角指令值 - 相对转塔 |
| headingTel | double | 航向角遥测值 - 相对转塔 |
| turretHeading | double | 转塔航向--绝对 |
| targetDir | double | 方位 |
| targetDist1 | double | 目标距离 |
| targetDist2 | double | 目标斜距 |
转塔2遥测(turret2Info)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| wkMod | int | 转塔工作模式 0x01 GNSS跟踪模式 0x02手动操作 0x03 角度定位模式 0x04 转台停止 除了以上值以外都表示未知 |
| wkStatus | int | 工作状态 0x01 撤收 0x02工作 除了以上值以外都表示未知 |
| panCmd | double | 俯仰角指令值 - 相对转塔 |
| panTel | double | 俯仰角遥测值 - 相对转塔 |
| headingCmd | double | 航向角指令值 - 相对转塔 |
| headingTel | double | 航向角遥测值 - 相对转塔 |
| turretHeading | double | 转塔航向--绝对 |
| targetDir | double | 方位 |
| targetDist1 | double | 目标距离 |
| targetDist2 | double | 目标斜距 |
精准辅助降落遥测(visionVPLInfo)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| sysStatus | int | 系统工作状态 0:异常 1:正常 |
| vplSwitch | int | 功能开关状态/ 用户开关0:关闭,1:开启 |
| ctrlMeans | int | 控制方式:0:视觉控制,1:飞控控制 |
| decTagID | int | 检测到标签ID 低位到高位 小-》中-》大 |
| camStatus | int | 相机工作状态: 0:异常,1:正常 |
| standbyStatus | int | 备降状态 |
| vXY | double | 横向速度 |
| vZ | double | 纵向速度 |
| vYaw | double | 偏航角速度 |
| tagBodyX | int | 标签机体坐标X |
| tagBodyY | int | |
| tagBodyZ | int | |
| tagBodyYaw | int | |
| tagNedYaw | int | |
| tagNedX | int | 标签NED坐标X |
| tagNedY | int | |
| tagNedZ | int |
氢燃料电池遥测(hydrogenBatteryInfo)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| productNumber | int | 产品序号1~65535 |
| h2 | double | 氢气 0.0~350.0(bar) |
| outVoltage | double | 输出电压 0.0 ~ 99.0(V), |
| outCurrent | double | 输出电流 0.00 ~ 93.75(A), |
| battVoltage | double | 电池电压 0.0 ~ 99.0(V) |
| battCurrent | double | 电池电流-93.75 ~ +93.75(A),偏移+93.75 |
| powerpackState | int | 电堆状态 0~9 |
| errorCode | int | 错误码0~255 |
| outsideTemp | double | 外壳温度 -40.0 ~ 100.0(℃) |
| outsideHummidity | double | 外壳湿度 0.0 ~ 100.0(%) |
| insideTempe | double | 内部温度-40.0 ~ 100.0(℃) |
| insideHummidity | double | 内部湿度0.0 ~ 100.0(%) |
| cells | array[obj] | |
| cells里单个json如下 | ||
| voltage | double | 电压0.0 ~ 99.0(V) |
| ntc | double | NTC温度-40.0 ~ 100.0(℃) |
| sht | double | SHT温度-40.0 ~ 100.0(℃) |
| current | double | 电流0.00 ~ 93.75(A) |
| stackState | double | 燃料堆状态0 ~ 9 |
| cpCount | int | 0 ~ 99 |
| bopCount | int | TBD |
| fan | int | 风扇转速0 ~ 100 |
| shtHummidity | double | SHT湿度 0.0 ~ 100.0(%) |
| anodeTemp | double | 阳极温度-40.0 ~ 100.0(℃) |
| cathodTemp | double | 阴极温度-40.0 ~ 100.0(℃) |
| inTakeTemp | double | 进气口-40.0 ~ 100.0(℃) |
| purgeValveTemp | double | 放气阀温度-40.0 ~ 100.0(℃) |
| lowH2Press | double | 0.0 ~ 5.0(bar) |
视觉引导遥测-智能点云系统(visInspectInfo)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| visionSwitch | int | |
| lsfSwitch | int | |
| udpStreamStatus | int | |
| rtspStreamStatus | int | |
| lsfX | double | |
| lsfY | double | |
| targetBodyX | double | |
| targetBodyY | double | |
| targetBodyZ | double | |
| systemStatus | int | |
| towerType | int |
雷达仿线遥测-智能点云系统(ldInspectInfo)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| lidarSwitch | int | |
| obsSwitch | int | |
| systemStatus | int | |
| lidarStatus | int | |
| cableDir | int | |
| distYaw | double | |
| distY | double | |
| distZ | double |
雷达避障遥测**(ldObstacleInfo)**
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| obsRisk | int | |
| distFront | double | 前方障碍物距离 |
| distDown | double | 下方障碍物距离 |
| distLeft | double | 左方障碍物距离 |
| distRight | double | 右方障碍物距离 |
4G遥测(4GInfo)
内容
| 字段 | 类型 | 备注 |
|---|---|---|
| simStat | int | |
| rssi | int | |
| sinr | int | |
| rsrq | int | |
| ber | int | |
| delay | int | |
| peak | int | |
| mean | int | |
| bytesSent | double | |
| bytesRecv | double |
CANHub遥测(canhub)
| 字段 | 类型 | 备注 |
|---|---|---|
| array[json],单个json的内容,依次为HUB12345678 | ||
| abnormalState | string | 异常状态,格式为:a |
| temperature | int | 温度 |
| voltage | float | 电压 |
| time | int | 时间 |
| recvCount | string | 接收计数 |
| errCount | string | 错误计数 |
RS485-PWM(rs485pwm)
| 字段 | 类型 | 备注 |
|---|---|---|
| array[json],单个json的内容,依次为左前、右前、左后、右后 | ||
| pwm | string | pwm |
| time | string | time |
| voltage | string | 电压 |
| softwareReset | int | 软件复位:>0异常,否则正常 |
| rstReset | int | RST管脚复位:>0异常,否则正常 |
| poweronReset | int | 上电复位:>0异常,否则正常 |
| watchDogReset | int | 看门狗复位:>0异常,否则正常 |
| timeout20ms | int | 通信超时20毫秒:>0异常,否则正常 |
| timeout10ms | int | 通信超时10毫秒:>0异常,否则正常 |
| timeout5ms | int | 通信超时5毫秒:>0异常,否则正常 |
| reserve | int | 预留:>0异常,否则正常 |
机载发电模块(powerModel)
| 字段 | 类型 | 备注 |
|---|---|---|
| mainBatteryV | float | 主电池电压 |
| generatorV | float | 发电机电压 |
| outTotalI | float | 输出总电流 |
| outTotalW | float | 输出总功率 |
| powerOutTotalP | float | 电源输出总功率 |
| powerModelTemp | int | 电源模块温度 |
| avionicsPowerState | int | 航电供电状态:1电池供电,其它非电池供电 |
| avionicsPowerV | float | 航电供电电压 |
| avionicsPowerI | float | 航电供电电流 |
| avionicsPowerP | float | 航电供电功率 |
| batteryChargeState | int | 电池充电状态:0停止充电,其它正在充电 |
| batteryChargeV | float | 电池充电电压 |
| batteryChargeI | float | 电池充电电流 |
| batteryChargeP | float | 电池充电功率 |
| taskPayloadPowerState | int | 任务载荷供电状态:0停止充电,其它正在充电 |
| taskPayloadV | float | 任务载荷供电电压 |
| taskPayloadI | float | 任务载荷供电电流 |
| taskPayloadP | float | 任务载荷供电功率 |
飞行指控、航线
获取远程航线
协议内容
通信方式:mqtt HTTP,数据内容为json格式;(mqtt是发给Pilot_control的消息(内容可为空),http是Pilot_control发出去的航线方式,http地址根据2.2站点配置获取)
主题:/pushRoute
内容:
| 字段名称 | 类型 | 描述 | 备注 |
|---|---|---|---|
| id | string | 飞控ID | |
| pilotModel | string | 无人机型号 | CW_007 CW_10, CW_15, CW_15II, CW_20, CW_25, CW_25E, CW_30, CW_100, PH_25 |
| deviceType | string | 载荷类型 | Lidar、Camera、Gimbal |
| deviceModel | Array(string) | 载荷型号 | 见2.3.1载荷设置型号 |
| features | Array(json) | 航路点数据 | 见航点数据定义表 |
| count | Int | 航路点个数 |
航点数据定义表
| 字段 | 类型 | 内容 | 备注 |
|---|---|---|---|
| INT8类型,范围为(-128—127) | |||
(航路点属性)枚举
cpp
typedef enum
{
/** Unknown motion */
VMT_Unknown = -1,
/** Common motion */
VMT_Common = 0,
/** Orbit motion */
VMT_Orbit = 1,
/** Clockwise(right) turn motion, otherwise Anticlockwise */
VMT_Right = 2,
/** Clockwise(right) orbit motion, otherwise Anticlockwise */
VMT_OrbitRight = VMT_Orbit | VMT_Right,
/** Tangent entry motion */
VMT_Tangent = 4,
/** Tangent and anticlockwise orbit motion */
VMT_OrbitTangent = VMT_Orbit | VMT_Tangent, // = 5
/** Tangent and otherwise(right) orbit motion */
VMT_OrbitRightTangent = VMT_Orbit | VMT_Right | VMT_Tangent, // = 7
/** Above motion */
VMT_Above = 8,
/** Below motion */
VMT_Below = 16,
/** Above altitude and anticlockwise orbit motion */
VMT_OrbitAbove = VMT_Orbit | VMT_Above, // = 9
/** Above altitude and clockwise(right) orbit motion */
VMT_OrbitRightAbove = VMT_Orbit | VMT_Right | VMT_Above, // = 11
/** Below altitude and anticlockwise orbit motion */
VMT_OrbitBelow = VMT_Orbit | VMT_Below, // = 17
/** Below altitude and clockwise(right) orbit motion */
VMT_OrbitRightBelow = VMT_Orbit | VMT_Right | VMT_Below, // = 19
/** Hovering motion */
VMT_Hovering = 32,
/** Straight(slope) motion */
VMT_Straight = 64,
/** Preturn motion */
VMT_Preturn = 128,
/** Breaking motion */
VMT_Breaking = 256,
/** Landing motion */
VMT_Landing = 512,
} VTOLMotionType;actpointType(航路点动作属性)枚举
cpp
typedef enum
{
/** Unknown action */
VAT_Unknown = -1,
/** Common action */
VAT_Common = 0,
// TODO: next version insert aim at flag as instant action.
/** Camera instant snapshot action */
VAT_Snapshot = 1,
/** Camera continuous mapping action */
VAT_Mapping = 2,
/** Camera continuous monitoring action */
VAT_Monitoring = 4,
// TODO: next version insert flash flag for lidar and searchlight.
/** Camera or lidar continuous scanning action */
VAT_Scanning = 8,
/** Searchlight continuous lighting action */
VAT_Lighting = 16,
// TODO: next version set insert cry out flag as instant action.
/** Megaphone continuous shouting action */
VAT_Shouting = 32,
/** Loads parachute action */
VAT_Parachute = 64,
/** Cannon shoot action */
VAT_Shoot = 128,
/** Cannon continuous shooting action */
VAT_Strafing = 256,
} VTOLActionType;cpp
enum{
LAND = 1 //降落航点
EMERGENCY_LAND = 2 //紧急降落点
FIXED = 3 //定点环绕点
QUICK = 4 //快速飞行航点
}示例数据
json
{
"count": 46,
"deviceModel": [
"CA102/35mm",
"CA103/35mm"
],
"deviceType": "Camera",
"features": [
{
"geometry": {
"coordinates": [
104.458044,
31.581121999999997,
1035.88
],
"type": "Point"
},
"properties": {
"actpointType": 0,
"nextIndex": 1,
"orbitRadius": 160,
"orbitTime": 0,
"thisIndex": 0,
"waypointType": 129
},
"type": "Feature"
}
.....
],
"id": "9494",
"pilotModel": "PH_25"
}起降指令
通信方式:MQTT
主题:/takeoffAndLand
内容:
| 字段名称 | 类型 | 描述 |
|---|---|---|
| state | Int | 起飞:1;降落:2 |
plain
{"state":1}起飞失败错误枚举码
plain
enum LAUNCH_ERROR_CODE{
Normal = 0x00, //起飞正常
REPEAT_SEND = 0x01, //重复发送起飞
GNSS_NO_FIX = 0x02, //GNSS未锁定
AP_NO_AUTO = 0x03, //不是自动模式
THROTTLE_TOO_LARGE = 0x04, //油门高过限制
NO_LANDING_PLAN = 0x05, //未做降落计划
SOFT_FIRMWARE_INCOMPATIBLE = 0x06,//地面站软件与飞控固件不兼容
EXT_MAG_FAILURE = 0x07, //外置磁罗盘失效
MAG_ERR_LIMIT = 0x08, //磁罗盘和欧拉角偏差过大
LAUNCH_AIRSPEED_COMM = 0x09, //外置气压计通讯故障
LAUNCH_MAG_GNSSHEADING_ERR_LIMIT = 0x0A, //双GNSS侧向与磁罗盘偏差
LAUNCH_AIRSPEED_LIMIT = 0x0B, //空速过大
LAUNCH_AUTO_PRE_TEST_FAILED = 0x0c, //未进行自动化飞前检查
LAUNCH_ELECTRIC_FENCE_LIMIT = 0x0d,//无人机在禁飞区内无法起飞
SOFT_OEM_INCOMPATIBLE = 0x55, //OEM版本,与地面站软件不兼容
};cpp
enum LAUNCH_ERROR_CODE{
LAUNCH_OK = 0x00, //起飞正常
LAUNCH_REPEAT = 0x01, //重复起飞
LAUNCH_GNSS_NOFIX = 0x02, //GNSS没有锁定
LAUNCH_AUTO_NO = 0x03, //自驾未开启
LAUNCH_THR_LIMIT = 0x04, //油门超限
LAUNCH_LAND_PLAN = 0x05, //未做降落计划(旋翼暂无)
LAUNCH_COMPATIBLE = 0x06, //软件不适配
LAUNCH_MAG_BAK = 0x07, //外置磁罗盘异常
LAUNCH_MAG_ERR_LIMIT = 0x08, //磁航向偏差大
LAUNCH_HIGH_MODE = 0x09, //非高度自控
LAUNCH_PRE_CHECK_FAILED = 0x0C,//自检未通过
LAUNCH_IN_GEOFENCE = 0x0D, // 位于电子围栏起飞
LAUNCH_ROUTE_CONFLICT = 0x0E, //起飞时航线与电子围栏冲突
LAUNCH_HARDKEY_MODE = 0x11, //硬件开关未使能
LAUNCH_CAN1_MODE = 0x12, //CAN1状态
LAUNCH_OEM_HC = 0x55,
};航点跟踪(航点导航)
通信方式:MQTT
主题:/trackTo
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| idx | Int | 航点id |
json
{ "idx": 2 }快速飞行计划
通信方式:MQTT
主题:/quickWaypoint
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| lat | Double | 纬度 |
| lon | Double | 经度 |
| alt | Double | 海平面高度(m ) |
| orbitRadius | int | 盘旋半径(m) |
| direction | bool | 盘旋方向,0为顺时针,1为反时针 |
json
{
"lat": 31.11126,
"lon": 103.75729,
"alt": 850,
"orbitRadius": 200,
"direction": 0
}定点巡视
通信方式:MQTT
主题:/fixedPointFollow
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| lat | Double | 飞机纬度 |
| lon | Double | 飞机经度 |
| alt | Double | 海拔高度(m ) |
| targetLat | Double | 目标点纬度 |
| targetLon | Double | 目标点经度 |
| targetAlt | Double | 目标点的地面高度(m) |
| orbitRadius | int | 盘旋半径(m) |
| direction | int | 盘旋方向,0为顺时针,1为反时针 |
| tgtTrack | int | 0吊舱目标跟踪,需要手动退出,其它是凝视,不需要手动退出:默认是0 |
| flyStatus | int | 飞行状态,只有设置了飞机航路点时才生效:1悬停,其它为盘旋 |
飞机经纬度为0时,飞机是继续当前航线任务,不会导航到793航点盘旋,但是吊舱会进入目标跟踪状态;如果需要吊舱执行其它任务,需要先再次调用该接口退出吊舱的目标跟踪状态,所有参数全部传0即可;(2)当会导航到793航点盘旋,不用调该接口退出目标跟踪状态。
同步航线到飞机
协议内容
通信方式:MQTT
主题:/syncRoute
线目标mqtt消息
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| features | array[json] | sdk返回的航线features json数据列表,结构如3.2.6.2示例数据所示 |
| pushVideoUrl | string | 可见光视频的推流地址:如果需要分发的话,传空;如果需要推流的话,传具体的推流地址 |
| pushSdVideoUrl | string | 红外视频的推流地址:如果需要分发的话,传空;如果需要推流的话,传具体的推流地址 |
| routeUrl | string | 请求航线的url |
| insertIndex | int | 默认为0; 覆盖航线时,传0;续接航线时,传新航线第一个航点的thisIndex,即续接之前本地已有航点的数量(不算特殊航点和降落航点) |
| takeoffLand | int | 0是固定起降,其它是移动起降,默认为0 |
备注:同步航线默认就会先清空远程,在上传航点;目前航线里包含巡线目标点相关信息,不需要单独发3.2.9巡
示例数据
json
{
"code": 200,
"data": {
"pushVideoUrl": "",
"features": [
{
"type": "Feature",
"coordinates":[]
"properties": {
"propertyTypes": "(2:4,5)",
"visible": 1,
"waypointsGuids": [
"e93a8716-ee1d-4e51-849e-c62890e54241",
"eff75066-679a-478f-80e3-c609e0c5262d"
],
"enable": 1,
"posture": [
0,
0,
0
],
"parentGuid": "cd97d0da-855d-4c81-aff1-bf4906ab45da",
"name": "_route",
"guid": "3d5bdb59-5f1c-48e5-b783-14036a68d25f",
"comment": "",
"selecti": -1,
"style": "",
"type": "ENT_Route"
}
},
{
"geometry": {
"coordinates": [
104.44645744312645,
31.58060703885953,
858
],
"type": "Point"
},
"type": "Feature",
"properties": {
"prevIndex": -1,
"propertyTypes": "(8:2,0,0,0,2,0,4,0)",
"visible": 1,
"posture": [
0,
0,
0
],
"index": 0,
"selecti": -1,
"nextIndex": 1,
"type": "ENT_Waypoint",
"absSpeed": -1,
"orbitRadius": 155.180360445192,
"enable": 1,
"motionType": 193,
"parentGuid": "3d5bdb59-5f1c-48e5-b783-14036a68d25f",
"name": "",
"guid": "e93a8716-ee1d-4e51-849e-c62890e54241",
"comment": "",
"style": "",
"orbitTime": -1
}
},
.......
{
"geometry": {
"coordinates": [
104.45501990664978,
31.587061563239494,
858
],
"type": "Point"
},
"type": "Feature",
"properties": {
"prevIndex": 3,
"propertyTypes": "(13:2,0,0,3,0,0,0,2,2,4,0,3,0)",
"visible": 1,
"posture": [
0,
0,
0
],
"index": 4,
"selecti": -1,
"nextIndex": 5,
"type": "ENT_Waypoint",
"absSpeed": -1,
"orbitRadius": 0,
"frequency": 0,
"gesture": [
0,
0,
0
],
"actionType": 1,
"targetPointIndex": 0,
"targetPoint": [
104.456102957837,
31.5866646623116,
556
],
"enable": 1,
"motionType": 128,
"parentGuid": "3d5bdb59-5f1c-48e5-b783-14036a68d25f",
"name": "",
"guid": "0aff2c76-3843-4839-bc03-621df2350853",
"comment": "",
"style": "",
"orbitTime": -1
}
......
}
]
},
"id": "10859494",
"type": "request"
}发送降落计划--固定起降模式
主题:/sendLandPlan
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| Array[double] | 经纬高 | |
| int | 进场方向(-180 到180) | |
| Bool | 右手模式:0左盘旋;1右盘旋 | |
| int | 降落类型 94:正常降落航线 0:快速降落航线-左盘旋 1:快速降落航线-右盘旋 |
移动起降模块
请求降落点参数
主题:/getMoveLandParam
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| offsetX | float | 横偏 |
| offsetY | float | 前后偏 |
| offsetZ | float | 垂直偏差 |
| ffsetX | float | 伴随航线横偏 |
| offsetHeading | float | 相对天线指向角度 |
| checkRight | int | 大于等于0右手模式,其它非右手模式 |
设置降落点参数
主题:/setMoveLandParam
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| offsetX | float | 横偏 |
| offsetY | float | 前后偏 |
| offsetZ | float | 垂直偏差 |
| ffsetX | float | 伴随航线横偏 |
| offsetHeading | float | 相对天线指向角度 |
| checkRight | int | 1右手模式,-1非右手模式 |
采集请求
主题:/getMoveCapture
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| landRX | double | 降落点RX |
| landRY | double | 降落点RY |
| landX | double | 降落点X |
| landY | double | 降落点Y |
| landZ | double | 降落点Z |
| landHeading | double | 降落点H |
计算降落相对位置
主题:/getLandPosComputerResult
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| offsetX | double | 横偏 |
| offsetY | double | 前后偏 |
| offsetZ | double | 垂直偏差 |
发送紧急降落计划
主题:/sendUrgentLandPlan
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| Array[double] | 经纬高 | |
| int | 进场方向(-180 到180) | |
| Bool | 右手模式:0左盘旋;1右盘旋 | |
| int | 盘旋高度 |
发送视觉备降点到飞机
主题:/sendVisualAlternateLandPoint
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| alternatePoint | array | 备降点 |
| alternatePoint单个备降点信息json格式 | ||
| lat | double | 纬度 |
| lon | double | 经度 |
| alt | double | 高度 |
| yaw | double | 航向角 |
备注:基于视觉的备降点,是应用处理的
plain
{
"alternatePoint": [
{
"lat": 131.323232, ...
},
]
}巡线同步目标信息
主题:/syncTargetInfo
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| latitude | double | 纬高 |
| longitude | double | 经度 |
| altitude | double | 高度 |
plain
[{
"latitude": 30.1234,
"longitude": 103.1234,
"altitude": 200
}, {
"latitude": 30.1234,
"longitude": 103.1234,
"altitude": 200
}]更新降落航线795点
主题:/update795Point
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| latitude | double | 纬高 |
| longitude | double | 经度 |
| altitude | double | 高度 |
plain
{
"latitude": 30.1234,
"longitude": 103.1234,
"altitude": 200
}发送机库降落点和备降点到飞机
主题:/hanger/setLandPoints
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| hangerTotalNum | int | 机库总数 |
| hangerNum | string | 当前机库编号 |
| hangerState | int | 机库状态,1可用,2不可用 |
| altLandPointNum | int | 备降点数量(为0代表只有一个降落点,没有备降点,飞控失败,至少一个备降点) |
| landMethod | int | 降落方式,0:普通降落(四边降落),1:快速降落(盘旋降落);同一个机库采用同一种降落方式 |
| res1 | int | 保留字段1 |
| res2 | int | 保留字段2 |
| altLandPoints | array | 对应编号机库的降落点及备降点数据,最多15个点 |
altLandPoints内容
| 类型 | 描述 |
|---|---|
| int | 索引(降落点,赋值0;备降点从1依次递增) |
| int | -1逆时针,1顺时针 |
| int | -180~180度,单位0度 |
| double | 纬度,单位度 |
| double | 经度,单位度 |
| double | 高度,单位m |
plain
{
"hangerTotalNum: 2,
"hangerNum": 1,
"hangerState": 1,
"altLandPointNum": 1,
"landMethod": 1,
"res1": 0,
"res2": 0,
"altLandPoints": [
{
"index": 0,
"direction": 1,
"heading": 90,
"lat": 103.3333222,
"lon": 31.2424343,
"alt": 600,
},{
"index": 1,
"direction": 1,
"heading": 90,
"lat": 103.5333222,
"lon": 31.2424343,
"alt": 600,
}
]
}从飞机请求机库降落点和备降点
主题:/hanger/getLandPoints
通信:MQTT
内容 json格式
给Pilot_control必传这两个数据
| 字段名称 | 类型 | 描述 |
|---|---|---|
| hangerTotalNum | int | 机库总数 |
| hangerNum | string | 当前机库编号 |
Pilot_control发送出去的json结构
| 字段名称 | 类型 | 描述 |
|---|---|---|
| hangerTotalNum | int | 机库总数 |
| hangerNum | string | 当前机库编号 |
| hangerState | int | 机库状态,1可用,2不可用 |
| altLandPointNum | int | 备降点数量(为0代表只有一个降落点,没有备降点,飞控失败,至少一个备降点) |
| landMethod | int | 降落方式,0:普通降落(四边降落),1:快速降落(盘旋降落);同一个机库采用同一种降落方式 |
| res1 | int | 保留字段1 |
| res2 | int | 保留字段2 |
| altLandPoints | array | 对应编号机库的降落点及备降点数据,最多15个点 |
altLandPoints内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| index | int | 索引(降落点,赋值0;备降点从1依次递增) |
| direction | int | -1逆时针,1顺时针 |
| heading | int | -180~180度,单位0度 |
| lat | double | 纬度,单位度 |
| lon | double | 经度,单位度 |
| alt | double | 高度,单位m |
终止飞行
主题:/sendAbort
通信:MQTT
内容 空
回路控制(一键改高、恢复航高)
主题:/sendAutoPilotLoop
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| loopType | int | 控制回路类型 0, /// 1, /// 2, /// 3, /// 4, /// 5, /// |
| control | int | 控制回路状态 0, //!< Loop disabled 1, //!< Loop enabled,一键改高 2, //!< Loop enabled, with automatic command,恢复航高 3 //!< Number of loop states |
| value | double | 传入需要修改的高度值,跟飞机当前高度±200才能生效;比如当前高度700,则传入500~900之内的某一个值 |
plain
{
"loopType": 2, "control":1, "value": 900
}plain
{
"loopType": 2, "control":2, "value": 0
}立即悬停
主题:/hoverNow
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| isHover | int | 1-HoverNow, 0-HoverResume |
发送应急备降点
主题:/sendEmergencyLandingPoints
通信:MQTT
内容 json格式
备注**:**
| 字段名称 | 类型 | 描述 |
|---|---|---|
| landPoints | array | 应急备降点array |
| 单个备降点json | ||
| lat | double | 纬度 |
| lon | double | 经度 |
| alt | double | 高度 |
请求应急备降点
主题:/getEmergencyLandingPoints
通信:MQTT
内容 json格式
备注: 应急返航时自动建降落航线时使用,是飞控处理的
| 字段名称 | 类型 | 描述 |
|---|---|---|
| landPoints | array | 应急备降点array |
| 单个备降点json | ||
| lat | double | 纬度 |
| lon | double | 经度 |
| alt | double | 高度 |
更新单个航点
主题:/updateWayPoint
通信:MQTT
内容 json格式
备注: 上传航线到飞控后,更新单个航点
| 字段名称 | 类型 | 描述 |
|---|---|---|
| index | int | 当前航路点 |
| nextIndex | int | 指向的下一航路点 |
| lat | double | 纬度 |
| lon | double | 经度 |
| alt | double | 高度,单位m |
| orbitRadius | int | 盘旋半径,单位m,为0不盘旋 |
| orbitTime | int | |
| orbitRight | bool | 是否为右盘旋方向,1为顺时针,0为反时针 |
| actSlope | bool | 坡度 |
| actLight | bool | 航向保持 |
| actHover | bool | 悬停 |
| actOrbitAbove | bool | 超高盘旋 |
| actOrbitBelow | bool | 超低盘旋 |
| actPreture | bool | 预转弯 |
清空所有航点
主题:/deleteWayPointList
通信**:******
内容 空
备注:清空飞控上的所有航点
请求目标巡线点
主题:/getTargetPoints
通信:MQTT
内容 json格式
备注:请求json为空即可,pilotControl回复为以下json结构
| 字段名称 | 类型 | 描述 |
|---|---|---|
| targetPoints | array | 目标巡线点列表 |
| targetPoints列表里的单个json | ||
| index | int | 目标点id |
| lat | double | 纬度 |
| lon | double | 经度 |
| alt | double | 高度 |
| targetIndex1 | int | 目标点对应的航点1 |
| targetIndex2 | int | 目标点对应的航点2 |
| targetIndex3 | int | 目标点对应的航点3 |
| targetIndex4 | int | 目标点对应的航点4 |
示例数据
plain
{
"code": 200,
"data": {
"targetPoints": [
{
"index": 0,
"lat": 123.3233213
...
}
]
},
"type": "response"
...
}航线相关操作进度条
主题:/updateProgress
通信:MQTT
内容 json格式
备注:在进行航线相关操作时(上传航线、请求航线、清空航线等),pilotControl就会自动发送这个进度条消息
| 字段名称 | 类型 | 描述 |
|---|---|---|
| type | string | 航线操作类型 CLEAR_REMOTE_ALL 清空远程航线 SEND_LOCAL 上传本地航线 REQ_REMOTE_ALL 请求远程航线 SEND_ALTERNATE 上传应急备降点 REQ_REMOTE_ALTERNATES 请求远程应急备降点 REQ_REMOTE_TARGETS 请求远程目标点 SEND_LOCAL_TARGETS 上传目标点 UPDATE_WAYPOINTS 更新多个航点 |
| progressVal | int | 进度条值,单位% |
更新多个航点
主题:/updateWayPoints
通信:MQTT
内容 json格式
备注: 上传航线到飞控后,后续更新多个航点协议接口
| 字段名称 | 类型 | 描述 |
|---|---|---|
| points | array[json] | 需要更新的航点列表 |
| points里单个点json结构如下 | ||
| index | int | 当前航路点 |
| nextIndex | int | 指向的下一航路点 |
| lat | double | 纬度 |
| lon | double | 经度 |
| alt | double | 高度,单位m |
| orbitRadius | int | 盘旋半径,单位m,为0不盘旋 |
| orbitTime | int | |
| orbitRight | bool | 是否为右盘旋方向,1为顺时针,0为反时针 |
删除一段航线
主题:/deleteSpecifyWaypoints
通信:MQTT
内容 json格式
备注: 删除一段连续航点
| 字段名称 | 类型 | 描述 |
|---|---|---|
| startIndex | int | 起始航路点index序号 |
| count | int | 航点个数 |
精细化巡检配置信息
主题:/setInspectionConfigInfo
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| powerWaypointName | string | 精细化巡检名称(中文使用UTF8编码) |
| waypointNum | int | 巡航点个数 |
上传精细化巡检航线
主题:/setInspectionWaypointInfo
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| waypointId | int | 航点编号 |
| action | bool | 航点是否需要作业 |
| nameType | string | 杆塔部位名称,参考下面枚举 |
| towerName | string | 杆塔名称 |
| heading | float | 飞机航向角,单位deg |
| gimbalPitch | float | 吊舱俯仰角 |
| lat | float | 纬度,单位deg |
| lon | float | 经度,单位deg |
| alt | float | 高度,单位deg |
cpp
* enum NameType
* {
* NO_ACTION = 0, //无动作点
* PAGODA_ALL, //全塔
* PAGODA_HEAD, //塔头
* PAGODA_BODY, //塔身
* BIG_SIDE_INS, //大号侧绝缘子
* GROUND_WIRE_HANG, //地线挂点
* VERTICAL_HANG, //相悬垂线端挂点
* VERTICAL_INS_SHEET, //相悬垂绝缘片
* VERTICAL_PAGODA_HANG, //相悬垂塔端挂点
* BIG_SIDE_HANG, //大号侧塔端挂点
*
* LEFT_PAGODA_FOUND, //左侧塔基
* LEFT_BIG_PAGODA_FOUND, //左相大号侧塔基
* LEFT_BIG_PAGODA_BODY, //左相大号侧塔身
* LEFT_BIG_PAGODA_HEAD, //左相大号侧塔头
* LEFT_BIG_SIDE, //左侧大号侧通道
* LEFT_ABOVE_BIG_INS, //左上相大号侧绝缘子
* LEFT_MID_BIG_INS, //左中相大号侧绝缘子
* LEFT_BELOW_BIG_INS, //左下相大号侧绝缘子
* LEFT_ABOVE_BIG_HANG, //左上相大号侧地线挂点
* LEFT_BELOW_BIG_HANG, //左下相大号侧地线挂点
*
* RIGHT_PAGODA_FOUND, //右侧塔基
* RIGHT_BIG_PAGODA_FOUND, //右相大号侧塔基
* RIGHT_BIG_PAGODA_BODY, //右相大号侧塔身
* RIGHT_BIG_PAGODA_HEAD, //右相大号侧塔头
* RIGHT_BIG_SIDE, //右侧大号侧通道
* RIGHT_ABOVE_BIG_INS, //右上相大号侧绝缘子
* RIGHT_MID_BIG_INS, //右中相大号侧绝缘子
* RIGHT_BELOW_BIG_INS, //右下相大号侧绝缘子
* RIGHT_ABOVE_BIG_HANG, //右上相大号侧地线挂点
* RIGHT_BELOW_BIG_HANG, //右下相大号侧地线挂点
* }上传任务航线到飞机-端边任务同步
主题:/uploadRouteMission
通信:MQTT
内容 json格式
备注: 端边任务同步,上传任务航线(该航线就是jocpl生成的完整航线)到飞控NX上保存
示例可看test.json
执行任务-端边任务同步
主题:/executeRouteMission
通信:MQTT
内容 json格式
备注: 端边任务同步,执行任务
| 字段名称 | 类型 | 必填 | 描述 |
|---|---|---|---|
| guid | string | 是 | 任务唯一guid |
| hashCode | double | 是 | 哈希码 |
磁罗盘参数
请求磁罗盘参数(复合翼)
通信方式:mqtt
主题:/getMagCaliDataCW
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| magExternalGainA | double | 主磁罗盘传感器校准参数增益A,默认为0.0 |
| magExternalGainB | double | 主磁罗盘传感器校准参数增益B |
| magExternalGainC | double | 主磁罗盘传感器校准参数增益C |
| magExternalBiasA | double | 主磁罗盘传感器校准参数偏差A |
| magExternalBiasB | double | 主磁罗盘传感器校准参数偏差B |
| magExternalBiasC | double | 主磁罗盘传感器校准参数偏差C |
| magBuiltInGainA | double | 备份磁罗盘传感器校准参数增益A |
| magBuiltInGainB | double | 备份磁罗盘传感器校准参数增益B |
| magBuiltInGainC | double | 备份磁罗盘传感器校准参数增益C |
| magBuiltInBiasA | double | 备份磁罗盘传感器校准参数偏差A |
| magBuiltInBiasB | double | 备份磁罗盘传感器校准参数偏差B |
| magBuiltInBiasC | double | 备份磁罗盘传感器校准参数偏差C |
| magDecl | double | 磁偏角(度) |
| magDip | double | 磁偏角(度) |
设置磁罗盘参数(复合翼)
通信方式:mqtt
主题:/setMagCaliDataCW
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| magExternalGainA | double | 主磁罗盘传感器校准参数增益A,默认为0.0 |
| magExternalGainB | double | 主磁罗盘传感器校准参数增益B |
| magExternalGainC | double | 主磁罗盘传感器校准参数增益C |
| magExternalBiasA | double | 主磁罗盘传感器校准参数偏差A |
| magExternalBiasB | double | 主磁罗盘传感器校准参数偏差B |
| magExternalBiasC | double | 主磁罗盘传感器校准参数偏差C |
| magBuiltInGainA | double | 备份磁罗盘传感器校准参数增益A |
| magBuiltInGainB | double | 备份磁罗盘传感器校准参数增益B |
| magBuiltInGainC | double | 备份磁罗盘传感器校准参数增益C |
| magBuiltInBiasA | double | 备份磁罗盘传感器校准参数偏差A |
| magBuiltInBiasB | double | 备份磁罗盘传感器校准参数偏差B |
| magBuiltInBiasC | double | 备份磁罗盘传感器校准参数偏差C |
| magDecl | double | 磁偏角(度) |
| magDip | double | 磁偏角(度) |
请求磁罗盘参数(多旋翼)
通信方式:mqtt
主题:/getMagCaliDataMR
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| magExternalGainA | double | 主磁罗盘传感器校准参数增益A,默认为0.0 |
| magExternalGainB | double | 主磁罗盘传感器校准参数增益B |
| magExternalGainC | double | 主磁罗盘传感器校准参数增益C |
| magExternalBiasA | double | 主磁罗盘传感器校准参数偏差A |
| magExternalBiasB | double | 主磁罗盘传感器校准参数偏差B |
| magExternalBiasC | double | 主磁罗盘传感器校准参数偏差C |
| magDecl | double | 磁偏角(度) |
| magDip | double | 磁偏角(度) |
设置磁罗盘参数(多旋翼)
通信方式:mqtt
主题:/setMagCaliDataMR
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| magExternalGainA | double | 主磁罗盘传感器校准参数增益A,默认为0.0 |
| magExternalGainB | double | 主磁罗盘传感器校准参数增益B |
| magExternalGainC | double | 主磁罗盘传感器校准参数增益C |
| magExternalBiasA | double | 主磁罗盘传感器校准参数偏差A |
| magExternalBiasB | double | 主磁罗盘传感器校准参数偏差B |
| magExternalBiasC | double | 主磁罗盘传感器校准参数偏差C |
| magDecl | double | 磁偏角(度) |
| magDip | double | 磁偏角(度) |
开始校准
通信方式:mqtt
主题:/startMagneticCompassCali
内容:发给pilotControl的为空即可
结束校准
通信方式:mqtt
主题:/finishMagneticCompassCali
内容:发给pilotControl的为空即可,pilotControl接口调用成功会返回如下结构的data,复合翼才有备份磁罗盘相关信息
| 字段 | 类型 | 备注 |
|---|---|---|
| magExternalGainA | double | 主磁罗盘传感器校准参数增益A,默认为0.0 |
| magExternalGainB | double | 主磁罗盘传感器校准参数增益B |
| magExternalGainC | double | 主磁罗盘传感器校准参数增益C |
| magExternalBiasA | double | 主磁罗盘传感器校准参数偏差A |
| magExternalBiasB | double | 主磁罗盘传感器校准参数偏差B |
| magExternalBiasC | double | 主磁罗盘传感器校准参数偏差C |
| magBuiltInGainA | double | 备份磁罗盘传感器校准参数增益A |
| magBuiltInGainB | double | 备份磁罗盘传感器校准参数增益B |
| magBuiltInGainC | double | 备份磁罗盘传感器校准参数增益C |
| magBuiltInBiasA | double | 备份磁罗盘传感器校准参数偏差A |
| magBuiltInBiasB | double | 备份磁罗盘传感器校准参数偏差B |
| magBuiltInBiasC | double | 备份磁罗盘传感器校准参数偏差C |
| magDecl | double | 磁偏角(度) |
| magDip | double | 磁偏角(度) |
磁罗盘校准更新
通信方式:mqtt
主题:/updateMagneticCompassCali
内容:开始校准(3.3.1.5)成功后到结束校准(3.3.1.6)之前pilotControl会主动发磁罗盘校准更新消息
| 字段 | 类型 | 备注 |
|---|---|---|
| magExternalCaliX | double | 外置的x坐标,x、y代表一个点 |
| magExternalCaliY | double | 外置的y坐标,x、y代表一个点 |
| magExternalCaliZ | double | 二维用不上 |
| magBuiltInCaliX | double | 内置的x坐标,x、y代表一个点 |
| magBuiltInCaliY | double | 内置的y坐标,x、y代表一个点 |
| magBuiltInCaliZ | double | 二维用不上 |
应急参数
请求应急参数(复合翼)
通信方式:mqtt
主题:/getMissionLimitCW
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| commTimeout | int | 数据链超时时间(数据链丢失超时返航,电台超时),单位s |
| pilotTimeOut | int | 手动指令超时时间,单位s |
| gnssTimeout | int | GNSS超时时间(GNSS丢星超时),单位s |
| aglMin2Terrain | int | 最小近地高度 |
| altitudeMin | int | 最低高度极限 |
| altitudeMax | int | 最高高度极限 |
| altitudelLineLower | int | 航线最低高度保护 |
| lowPowerVoltage | double | 返航电压 |
| flightTimeout | int | 飞行总时间(总飞行时间限制,限时返航),单位s |
| landingTimeout | int | 降落超时时间(无人机距离降落点2km内电台超时降落,电台超时),单位s |
| obstacleTime | int | 避障时间,单位s |
| timeCauseLand | bool | 无人机距离降落点2km内电台超时降落 |
| timeCauseReturn | bool | 总飞行时间限制,限时返航 |
| groundProximityCauseWarning | bool | 离线高程近地规避 |
| altCauseFT | bool | 高度超过限制终止飞行 |
| altLossCauseFT | bool | 持续掉高返航 |
| altLineMatchCauseFT | bool | 保护高度超限终止飞行 |
| lowVoltageCauseFT | bool | 低电压返航开关 |
| gnssCauseFT | bool | GNSS丢星超时 |
| escOverTempStopClimb | bool | 电调过温停止爬升 |
| overVoltageSwitch | bool | 超压返航开关,油机(25、40、100)需要添加,电机不需要 |
| overVoltageValue | double | 超压返航电压,油机(25、40、100)需要添加,电机不需要 |
| gnssEmergencyType | int | GNSS丢失应急策略 0-GNSS丢失返航 1-GNSS丢失导致迫降 2-GNSS丢失导致盘旋 |
| engineFailedCauseReset | bool | 发动机熄火空中重启,油机(25、40、100)需要添加,电机不需要 |
设置应急参数(复合翼)
通信方式:mqtt
主题:/setMissionLimitCW
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| commTimeout | int | 数据链超时时间,单位s |
| pilotTimeOut | int | 手动指令超时时间,单位s |
| gnssTimeout | int | GNSS超时时间, 单位s |
| aglMin2Terrain | int | 最小近地高度 |
| altitudeMin | int | 最低高度极限 |
| altitudeMax | int | 最高高度极限 |
| altitudelLineLower | int | 航线最低高度保护 |
| lowPowerVoltage | double | 返航电压 |
| flightTimeout | int | 飞行总时间,单位s |
| landingTimeout | int | 降落超时时间,单位s |
| obstacleTime | int | 避障时间,单位s |
| timeCauseLand | bool | 无人机距离降落点2km内电台超时降落 |
| timeCauseReturn | bool | 总飞行时间限制,限时返航 |
| groundProximityCauseWarning | bool | 离线高程近地规避 |
| altCauseFT | bool | 高度超过限制终止飞行 |
| altLossCauseFT | bool | 持续掉高返航 |
| altLineMatchCauseFT | bool | 保护高度超限终止飞行 |
| lowVoltageCauseFT | bool | 低电压返航开关 |
| gnssCauseFT | bool | GNSS丢星超时 |
| escOverTempStopClimb | bool | 电调过温停止爬升 |
| overVoltageSwitch | bool | 超压返航开关,油机(25、40、100)需要添加,电机不需要 |
| overVoltageValue | double | 超压返航电压,油机(25、40、100)需要添加,电机不需要 |
| gnssEmergencyType | int | GNSS丢失应急策略 0-GNSS丢失返航 1-GNSS丢失导致迫降 2-GNSS丢失导致盘旋 |
| engineFailedCauseReset | bool | 发动机熄火空中重启,油机(25、40、100)需要添加,电机不需要 |
请求应急参数(多旋翼)
通信方式:mqtt
主题:/getMissionLimitMR
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| commTimeout | int | 数据链超时时间(数据链丢失超时返航,电台超时),单位s |
| pilotTimeOut | int | 手动指令超时时间,单位s |
| gnssTimeout | int | GNSS超时时间(GNSS丢星超时),单位s |
| aglMin2Terrain | int | 最小近地高度 |
| altitudeMin | int | 最低高度极限 |
| altitudeMax | int | 最高高度极限 |
| lowPowerVoltageUrgent | double | 低电压迫降 |
| lowPowerVoltage | double | 返航电压 |
| altCauseFT | bool | 高度超过限制终止飞行 |
| groundProximityCauseWarning | bool | 离线高程近地规避 |
| altLossCauseFT | bool | 持续掉高返航 |
| altLineMatchCauseFT | bool | 保护高度超限终止飞行 |
| lowVoltageCauseFT | bool | 低电压返航开关 |
| gnssCauseFT | bool | GNSS丢星超时 |
| LowVoltageRevertReturn | bool | 低电压原路返航 |
| LowVoltageLandInLocalization | bool | 低电压就地降落 |
| LowVoltageHover | bool | 低电压立即悬停 |
| altLineMatchCauseFT | bool | 低电压备降点降落 |
| CommLostRevertReturn | bool | 数据链丢失原路返航 |
| CommLostLandInLocalization | bool | 数据链丢失就地降落 |
| CommLostHover | bool | 数据链丢失立即悬停 |
| CommLostLandInBakWayPoint | bool | 数据链丢失备降点降落 |
设置应急参数(多旋翼)
通信方式:mqtt
主题:/setMissionLimitMR
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| commTimeout | int | 数据链超时时间(数据链丢失超时返航,电台超时),单位s |
| pilotTimeOut | int | 手动指令超时时间,单位s |
| gnssTimeout | int | GNSS超时时间(GNSS丢星超时),单位s |
| aglMin2Terrain | int | 最小近地高度 |
| altitudeMin | int | 最低高度极限 |
| altitudeMax | int | 最高高度极限 |
| lowPowerVoltageUrgent | double | 低电压迫降 |
| lowPowerVoltage | double | 返航电压 |
| altCauseFT | bool | 高度超过限制终止飞行 |
| groundProximityCauseWarning | bool | 离线高程近地规避 |
| altLossCauseFT | bool | 持续掉高返航 |
| altLineMatchCauseFT | bool | 保护高度超限终止飞行 |
| lowVoltageCauseFT | bool | 低电压返航开关 |
| gnssCauseFT | bool | GNSS丢星超时 |
| LowVoltageRevertReturn | bool | 低电压原路返航 |
| LowVoltageLandInLocalization | bool | 低电压就地降落 |
| LowVoltageHover | bool | 低电压立即悬停 |
| altLineMatchCauseFT | bool | 低电压备降点降落 |
| CommLostRevertReturn | bool | 数据链丢失原路返航 |
| CommLostLandInLocalization | bool | 数据链丢失就地降落 |
| CommLostHover | bool | 数据链丢失立即悬停 |
| CommLostLandInBakWayPoint | bool | 数据链丢失备降点降落 |
控制器参数
请求控制器参数(复合翼)
通信方式:mqtt
主题:/getControllerDataCW
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| takeoffMinimumHeight | float | 起飞最小高度,单位 m |
| climbingCoefficient | float | 爬升系数 |
| lateralDeviation | float | 横向偏差,单位 m |
| altitudeDeviation | float | 高度偏差,单位 m |
| slowAcceleration | float | 减速加速度,单位m/s2 |
| decelerationLengths | float | 减速长度,单位m |
| landingAltitude | float | 降落高度,单位m |
| cruisingSpeed | float | 巡航速度,单位m/s |
| climbingSpeed | float | 爬升速度,单位m/s |
| sinceStartingThrottle | float | 自启动油门 |
| minimumThrottle | float | 最小油门 |
| flyingThrottle | float | 待飞油门 |
| adjointRouteLength | float | 伴随航线长度 |
| adjointRouteWidth | float | 伴随航线宽度 |
| adjointRouteHeight | float | 伴随航线调整高度 |
| zeroHeight | float | 0点高度 |
| zeroRadius | float | 0点半径 |
| adjointRffsetX | float | 伴随航线横偏 |
| offsetHeading | float | 相对天线指向角度 |
设置控制器参数(复合翼)
通信方式:mqtt
主题:/setControllerDataCW
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| takeoffMinimumHeight | float | 起飞最小高度,单位 m |
| climbingCoefficient | float | 爬升系数 |
| lateralDeviation | float | 横向偏差,单位 m |
| altitudeDeviation | float | 高度偏差,单位 m |
| slowAcceleration | float | 减速加速度,单位m/s2 |
| decelerationLengths | float | 减速长度,单位m |
| landingAltitude | float | 降落高度,单位m |
| cruisingSpeed | float | 巡航速度,单位m/s |
| climbingSpeed | float | 爬升速度,单位m/s |
| sinceStartingThrottle | float | 自启动油门 |
| minimumThrottle | float | 最小油门 |
| flyingThrottle | float | 待飞油门 |
| adjointRouteLength | float | 伴随航线长度 |
| adjointRouteWidth | float | 伴随航线宽度 |
| adjointRouteHeight | float | 伴随航线调整高度 |
| zeroHeight | float | 0点高度 |
| zeroRadius | float | 0点半径 |
| adjointRffsetX | float | 伴随航线横偏 |
| offsetHeading | float | 相对天线指向角度 |
请求控制器参数(多旋翼)
通信方式:mqtt
主题:/getControllerDataMR
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| maxForwardVel | float | 最大前行速度,单位 m/s,0.01-100 |
| maxBackwardVel | float | 最大后退速度,单位 m/s,0.01-100 |
| navigationParam | float | 导航参数,0.01-100 |
| maxClimbingVel | float | 最大爬升速度,单位 m/s,0.01-100 |
| maxDescentVel | float | 最大下降速度,单位 m/s,0.01-100 |
| endHoverTime | float | 末端悬停时间,单位s,0.01-100 |
| endDescentVel | float | 终端下降速度,单位 m/s,0.01-100 |
设置控制器参数(多旋翼)
通信方式:mqtt
主题:/setControllerDataMR
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| maxForwardVel | float | 最大前行速度,单位 m/s,0.01-100 |
| maxBackwardVel | float | 最大后退速度,单位 m/s,0.01-100 |
| navigationParam | float | 导航参数,0.01-100 |
| maxClimbingVel | float | 最大爬升速度,单位 m/s,0.01-100 |
| maxDescentVel | float | 最大下降速度,单位 m/s,0.01-100 |
| endHoverTime | float | 末端悬停时间,单位s,0.01-100 |
| endDescentVel | float | 终端下降速度,单位 m/s,0.01-100 |
机载参数
数据管理-保存参数到自驾仪
通信方式:mqtt
主题:/sendSaveConfig
内容:空
遥控器
遥控器校准-RC配对
通信方式:mqtt
主题:/rcCalibration
内容:空
遥控器手动控制模式开关
通信方式:mqtt
主题:/rcManualEnable
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| onoff | bool | 手动控制模式开关,仅在专业模式下使用,遥控器Manual模式下全手动 false-关, true-开 |
设置硬件在回路仿真模式
通信方式:mqtt
主题:/simulation
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| onoff | bool | 0-飞控 1-在回路仿真 |
自驾仪开关
通信方式:mqtt
主题:/sendAPMode
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| onoff | bool | 自驾仪开关 |
配置电台id(GCS202)
通信方式:mqtt
主题:/setGcsRadioId
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| radioId | int | 电台id |
设置机载任务设备(航灯控制等)
通信方式:mqtt
主题:/sendTaskControl
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| type | int | 任务类型 0x01:任务设备电源开关控制 0x02:飞行航灯开关 0x03:爆闪灯开关 0x04:25E锁桨 |
| onoff | bool | true-开, false-关 |
接收机开关
通信方式:mqtt
主题:/sendRCSwitchCMD
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| onoff | bool | true-开, false-关 |
获取空油、满油电压
通信方式:mqtt
主题:/getOilScale
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| oilMax | double | 满油电压 |
| oilOffSet | double | 空油电压 |
设置空油、满油电压
通信方式:mqtt
主题:/setOilScale
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| oilMax | double | 满油电压 |
| oilOffSet | double | 空油电压 |
切换航点模式
通信方式:mqtt
主题:/setWaypointMode
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| mode | int | 航线数量模式 mode赋值0为800航点模式; mode赋值1为2048航点模式; |
获取当前航点模式
通信方式:mqtt
主题:/getWaypointMode
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| mode | int | 0为800航点模式; 1为2048航点模式; |
智能避障
视觉辅助降落
视觉功能总开关
通信方式:mqtt
主题:/sendVisionCmd
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| onoff | bool | 视觉功能总开关 |
雷达避障
设置毫米波雷达测距开关状态
通信方式:mqtt
主题:/sendMMWRCmd
内容:
| 字段 | 类型 | 是否必填 | 备注 |
|---|---|---|---|
| bool | 否 | true-总开关开,false-总开关关 | |
| fowardOpen | bool | 否 | true-前视测距开,false-前视测距关 |
| downwardOpen | bool | 否 | true-下视测距开,false-下视测距关 |
| leftOpen | bool | 否 | true-左视测距开,false-左视测距关 |
| rightOpen | bool | 否 | true-右视测距开,false-右视测距关 |
| backOpen | bool | 否 | true-后视测距开,false-后视测距关 |
获取毫米波雷达测距开关状态
通信方式:mqtt
主题:/getMMWRCmd
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| bool | 总开关 | |
| fowardOpen | bool | 前视测距 |
| downwardOpen | bool | 下视测距 |
| leftOpen | bool | 左视测距 |
| rightOpen | bool | 右视测距 |
| backOpen | bool | 后视测距 |
设置下视避障距离
通信方式:mqtt
主题:/setDownVisualRadarDist
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| val | int | 范围20~200m |
获取下视避障距离
通信方式:mqtt
主题:/getDownVisualRadarDist
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| val | int | 范围20~200m |
恢复航线高度
通信方式:mqtt
主题:/setRadarRecoveryHigh
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| onoff | bool | true-恢复航线高度 |
雷达功能开关-智能点云系统
通信方式:mqtt
主题:/setLdInspectSwitch
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| type | int | |
| value | int |
视觉功能开关-智能点云系统
通信方式:mqtt
主题:/setVisInspectSwitch
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| type | int | |
| value | int |
ADS-B
设置ADSB参数
通信方式:mqtt
主题:/sendADSBInputInfo
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| icao | int | 航班注册号 |
| callsign | string | 航班号 |
| adsbMode | int | ADSB工作模式 1 仅接收 2收发均工作 3关闭 |
| airType | int | 飞机型号(下拉选择) 1 light airplane 2 small airplane 3 large airplane 4 large airplane with high vortex 5 Heavy airplane 6 Highly Maneuverable Airplane 7 Rotorcraft 8 Glider /Sailplane 9 Lighter than Air 10 Parachute 11 Ultralight 12 UAV 13 space 14 Surface Vehicle-Emergency 15 Surface Vehicle-Service 16 Point Obstacle 17 Cluster Obstacle 18 Line Obstacle |
| stallSpeed | int | 飞机失速速度,单位m/s |
| airLengthWidth | int | 飞机长度及宽度,单位m* 0X01 0< L≤15 W≤23* 0X02 15< L≤25 W≤28.5* 0X03 15< L≤25 28.5<W≤34* 0X04 25< L≤35 W≤33* 0X05 25< L≤35 33<W≤38* 0X06 35< L≤45 W≤39.5* 0X07 35< L≤45 39.5<W≤45* 0X08 45< L≤55 W≤45* 0X09 45< L≤55 45<W≤52* 0X0A 55< L≤65 W≤59.5* 0X0B 55< L≤65 59.5<W≤67* 0X0C 65< L≤75 W≤72.5* 0X0D 65< L≤75 72.5<W≤80* 0X0E 75< L≤85 W≤80* 0X0F 75< L≤85 80<W* 0X0F 85< L |
| gnssOffsetLat | int | GNSS天线距离中心横向偏移量,单位:m* 0X01 0 0X02 Left2* 0X03 Left4 0X04 Left6* 0X05 Right2 0X06 Right4* 0X07 Right6 |
| gnssOffsetLon | int | GNSS天线距离机头偏移量,单位:m 0-60m |
| adsbDist | int | ADSB接收距离,单位km |
请求ADSB状态
通信方式:mqtt
主题:/requestADSBStaticInfo
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| icao | int | 航班注册号 |
| callsign | string | 航班号 |
| control | int | 工作模式* 0X00 STANDBY * 0X01 RECEIVE ONLY* 0X02 TX_ENABLE_1090* 0X04 TX_ENABLE_UAT |
| latitude | double | 纬度 |
| longitude | double | 经度 |
| altitude | double | 高度 |
| horSpeed | int | 地速,单位:m/s |
| verSpeed | int | 垂直速度,单位:m/s |
| fixType | int | GNSS锁定状态* 0X00 GNSS_NO_FIX_0* 0X01 GNSS_NO_FIX_1* 0X02 2D_FIX* 0X03 3D_FIX* 0X04 GNSS_DGNSS* 0x05 GNSS_RTK |
| adsbDist | double | ADSB接收距离,单位km |
飞检
空速置零
通信方式:mqtt
主题:/sendAirDataZero
内容:空
开始自检
通信方式:mqtt
主题:/sendAutoCheckCMD
内容:空
获取自检结果
通信方式:mqtt
主题:/getFlyCheckStatus
内容:
备注:3.4.2开始自检成功9s后调用获取自检结果,没获取到,每隔一秒获取一次自检结果,最多获取30次,还没获取到结果即获取自检结果失败
| 字段 | 类型 | 备注 |
|---|---|---|
| gnssFail | int | GNSS检查结果标志位(二进制判断,一位代表一个状态,0-为正常,1为异常)* 二进制第0位,主GNSS无定位* 二进制第1位,主GNSS定位状态异常(非RTK) _二进制第2位, 主GNSS定向状态异常__ _ 二进制第3位,备份GNSS无定位* 二进制第4位,主备水平位置异常* 二进制第5位,主备高度异常* 二进制第6位,主备水平速度异常* 二进制第7位,主备地向速度异常 |
| imuFail | int | * 偏航角与GNSS测向不一致 |
| magFail | int | * 磁罗盘数据超限 |
| pressFail | int | * 静压数据漂移异常 |
| servoDFail | int | * 方向舵偏转方向异常 |
| servoCTFail | int | * 方向舵舵机电流异常 |
| motorFail1 | int | * 2号电机连接异常 |
| motorFail2 | int | * 4号电机连接异常 |
| motorFail3 | int | * TBD(Default:0x00) |
| motorFail4 | int | |
| cameraFail | int | _双目相机检查结果标志位__ _ 标定异常:0代表异常,1代表正常* TBD* TBD* TBD* TBD* TBD* TBD* TBD |
强制通过自动化检查
通信方式:mqtt
主题:/sendAutoCheckForcedThroughCMD
内容:空
备注:开始自检(3.4.2)成功,并获取到自检结果(3.4.3),自检结果有异常则可以显示强制通过自检按钮
发送舵面飞前测试指令
通信方式:mqtt
主题:/sendSurfacePreTest
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| type | int | 0-副翼左偏 1-副翼中立 2-副翼右偏 3-升降上偏 4-升降中立 5-升降下偏 6-油门最小 7-油门10% 8-油门默认 9-油门最大 10-方向左偏 11-方向中立 12-方向右偏 |
发送舵面/电机校准指令
通信方式:mqtt
主题:/sendSurfaceTest
内容:
| 字段 | 类型 | 备注 |
|---|---|---|
| calibraType | int | 1是电机校准,2 是舵面校准 |
| 电机校准 | ||
| type | int | 不是PH_25的旋翼: 0-右前电机 1-左前电机 2-左后电机 3-右后电机 PH_25旋翼: 0-右前电机 1-左前电机 2-左电机 3-左后电机 4-右后电机 5-右电机 |
| width | int | 测试脉宽,1000-2000 |
| deviation | int | 偏差 |
| 舵面校准 | ||
| flightCtlType | int | 1是一代飞控,2是二代飞控 |
| index | int | 舵面序号 |
| deviation | int | 偏差,固定为8 |
| width | uint | 测试脉宽 |
| angle | int | 测试角度 |
遥测相关设置
设置地面站类型
主题:/setGcsType
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| gcsType | int | 1是GCS202,2是GCS1000,3是移动基站 |
设置链路类型
主题:/setLinkType
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| linkType | int | 选择链路类型:1自动切换,2主链路(UHF链),3备份链路(L频段) |
| timeout | int | 链路切换超时时间,默认10,范围10-100 |
P30链路控制
主题:/setLinkCtrParam
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| isGround | bool | 天地选项 true -此数据给地节点 false -此数据给天节点 |
| configOption | int | 配置选项 1:静默开关(重启失效) 2:功控开关 3:AFS 开关(下发主节点,从节点跟随改变) 4:DFS 开关(下发主节点,从节点跟随改变) 5:MFS 开关(下发主节点,从节点跟随改变) 6:MFS 频道切换(重启失效) 7:AES 加密 8:测角归零 9:测角天线间距修改 10:功率增益开关 11:温度保护开关 |
| data | int | 开关: 开:1 关:0 MFS: 跳频序列号(113)1~13 对应频点见频点划分算法AES: 看aesKey测角归零: 此功能打开之后,每发送一次打开指令,回归一次零点测角天线间距输入方法: 需连续发送两次指令;第一次数据为间距厘米,范围 20100 ,第二次数据为间距毫米,范围 0~9。如:需要设置 32.5cm,则第一次输入 32,第二次输入5,即可完成设置 |
| aesKey | string | 配置选项除了aes加密之外默认传空字符串;字符串只可为字母与数字,最长16 |
设置遥测配置
主题:/setTelemeConfigure
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| utmiss | bool | true-代表会发这个类型的遥测,false-不发这部分遥测 |
| standardData | bool | |
| flyData | bool | 移动平台-飞行数据 |
| gnssInfo | bool | |
| sensor | bool | |
| navigationDetails | bool | |
| battery | bool | |
| actuatorInfo | bool | |
| rcInfo | bool | |
| gimbalInfo | bool | |
| systemInfo | bool | |
| groundStation | bool | |
| link | bool | |
| searchLink | bool | |
| smartObstacleAvoidance | bool | |
| can | bool | |
| adsb | bool | |
| teleFrequency | int | 遥测频率,1秒几次:1hz、5hz(默认) |
| camera | bool | 二代飞控相机遥测 |
| lidarV1 | bool | 一代雷达遥测(只有lidarLR) |
| lidarV2 | bool | 二代雷达遥测 |
| controlData | bool | |
| ecuInfo | bool | |
| visionVPLInfo | bool | |
| hydrogenBatteryInfo | bool | |
| turret1Info | bool | 转塔1遥测 |
| turret2Info | bool | 转塔2遥测 |
| visInspectInfo | bool | 视觉引导遥测-智能点云系统 |
| ldInspectInfo | bool | 雷达仿线遥测-智能点云系统 |
| ldObstacleInfo | bool | 雷达避障遥测 |
| comm4GInfo | bool | 4G遥测 |
| canhub | bool | canhub遥测 |
| rs485pwm | bool | RS485-PWM |
| powerModel | bool | 机载发电模块 |
请求备份gnss数据
主题:/getBackupGnss
通信:MQTT
内容 json格式
备注:在需要用到备份gnss数据时在每隔5s在请求,在调用其他pilotControl通信库接口或者不需要展示的时候就不请求
| 字段名称 | 类型 | 描述 | |
|---|---|---|---|
| bakGNSSLon | double | 经度 | |
| bakGNSSLat | double | 纬度 | |
| bakGNSSHMSL | double | 高度 | |
| bakGNSSPDop | double | GNSS精度 | |
| bakGNSSNumSV | int | 卫星数 | |
| distGNSS | double | 离主GNSS距离,单位m | |
| bakGNSSTime | double | 时间戳 | |
| bakGNSSPFix | int | 0"No Fix",1"DRO",2"2D Fix",3"3D Fix",4"GNSS+DR" | |
| bakGNSSPFlags | int | 0主GNSS,2备份GNSS,3备份故障,4GNSS航向信息 |
搜寻链路相关
设置链路
主题:/setSearchLinkType
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| linkType | int | 选择链路类型:1自动切换,2主链路,3副链路 |
设置工作状态
主题:/setWorkMode
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| workMode | int | 工作状态:1上行工作,2上行静默 |
设置发射功率
主题:/setTransPower
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| power | int | 发射功率:1大功率,2中功率,3小功率 |
设置频道
主题:/setChannel
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| channel | int | 频道:1~9 |
设置动力电源电池的加热模式
主题:/setPowerBatteryHeatModel
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| model | int | 1自动,2手动开,3手动关 |
固件更新
查询run包信息
通信:MQTT
主题:/getRunInfo
内容
发给pilot
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| isRequire | int | 是 | 操作:0获取;1不获取 |
Pilot发出去的
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| company | string | 否 | 公司名称jouav-std:公司标品, jouav-[客户名称] 客户定制 |
| hw_platform | string | 否 | 航电硬件平台:np205 |
| chip_platform | string | 否 | 芯片平台nx |
| product | string | 否 | 当前产品:cw25e |
| product_id | int | 否 | 产品id |
| ver | string | 否 | 当前run包版本 |
获取外设版本信息
通信:MQTT
主题:/getBinInfo
内容
发给pilot
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| pageNo | int | 否 | 页码,默认1 |
| pageSize | int | 否 | 页数,默认10 |
Pilot发出去的
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| count | int | 是 | 总数 |
| processInfo | array[json] | 是 | 外设版本信息列表 |
| processInfo里的单个json格式如下: | |||
| id | int | 是 | 设备id |
| webName | string | 是 | 网页显示名称 |
| name | string | 是 | 英文名称 |
| version | string | 是 | 版本号 |
| timeStamp | double | 是 | 时间戳 |
| descp | string | 是 | 功能说明 |
通知固件更新
通信:********
主题:**/softUpdate**
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| url | string | 否 | 下载run包http地址,自选文件更新可不填 |
| fname | string | 否 | run包包名,自选文件更新可不填 |
上传升级包
通信:MQTT
主题:/softUpdate
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| path | string | 必填 | 自选更新文件的绝对路径 |
获取升级版本信息
通信:MQTT
主题:/getUpdateInfo
内容
pilot发出去的json:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| msgInfos | array | 必填 | 参数列表 |
| msgInfos里的单个json格式如下 | |||
| index | int | 必填 | 索引序号,内容按序号从小到大顺序显示 |
| name | string | 必填 | 字段名称 |
| value | string | 必填 | 字段对应的内容 |
固件更新状态
通信:MQTT
主题:/softUpdateStatus
内容
备注:通知固件更新执行后主动反馈该消息
| 字段名称 | 类型 | 描述 |
|---|---|---|
| err_desc | int | 0接收下载固件url;1下载固件;2上传固件;3更新固件 |
| status | int | 0成功;1失败; |
固件更新进度
通信:MQTT
主题:/getUpdateProgress
内容
备注:通知固件更新执行后主动反馈该消息
| 字段名称 | 类型 | 描述 |
|---|---|---|
| progress | int | 更新进度,[0-100],100为升级完成 |
获取pc版本号
通信:MQTT
主题:/getPcVersion
任务数据回放
打开数据回放
通信:MQTT
主题:/openTelemFile
内容
备注:打开数据回放文件并建立连接
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| replayFile | string | 是 | 本地文件绝对路径 |
| vehicleModel | string | 否 | 飞机型号,英文字母大写,可为CW-007或CW_007,默认为CW_15II CW_007 CW_10, CW_15, CW_15II, CW_20, CW_25, CW_25E, CW_30, CW_100, PH_25 |
| port | int | 否 | trans port,默认为-1 |
播放回放
通信:MQTT
主题:/resumeReplay
内容 空
暂停回放
通信:MQTT
主题:/pauseReplay
内容 空
获取回放文件总大小
通信:MQTT
主题:/getReplayFileSize
内容
pilot发出去的
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| totalSize | double | 是 | 回放文件总大小 |
获取回放当前位置
通信:MQTT
主题:/getFileStreamBytes
内容
pilot发出去的
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| currentPos | double | 是 | 回放文件当前位置 |
设置回放位置
通信:MQTT
主题:/setFileStreamBytes
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| filePos | double | 是 | 回放文件位置 |
获取回放速率
通信:MQTT
主题:/getReplayRate
内容
pilot发出去的
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| rate | double | 是 | 回放速率 |
设置回放速率
通信:MQTT
主题:/setReplayRate
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| rate | int | 是 | 回放速率,单位Hz,默认10Hz 1Hz、5Hz、10Hz、20Hz、40Hz、50Hz |
监控模块
吊舱相关
MG云台控制-吊舱控制(105协议)
协议内容
通信:MQTT
主题:/sendGimbalControlCmd
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| optoSensorCmd | int | 光学传感器指令, GimbalOptoSensorEnum枚举值,默认0 |
| cameraParam | double | 光学机构指令参数,默认0 |
| pitch | double | 吊舱上下转动,俯仰角,单位°,默认0; |
| headingAngle | double | 吊舱左右转动,航向角,单位°,默认0; |
| seroveCmd | int | 伺服机构指令模式(**默认为****0,微调时传0xff**) 0X00,// 速率模式 0X01,// 姿态模式 0X02,// 关伺服(休眠使用) 0X03,// 归零位锁定 0X04,// 零位调整 0X05,// 航向扫描 0X06,// 框架角模式 0xff, //微调 |
json
{ "optoSensorCmd": 23 }
//主输出切换json
{ "optoSensorCmd": 120 }
//开启画中画json
{ "optoSensorCmd": 121 }
// 关闭画中画json
{ "optoSensorCmd": 0, "cameraParam": 0, "pitch": 40, "headingAngle": 0 }
// 吊舱向上移动java
{
GimbalOptoSensorEnum::MG_IMAGE_OUTPUT_SWITCH = 0x17, // 输出切换(高清[可见光]/标清[红外])dec(23)
GimbalOptoSensorEnum::MG_PIP_ON = 0x78, // 开启画中画dec(120)
GimbalOptoSensorEnum::MG_PIP_OFF = 0x79, // 关闭画中画dec(121)
}吊舱光学传感器指令枚举
java
enum GimbalOptoSensorEnum
{
MG_NO_ACTION = 0X00, // 无动作
MG_FOCUS_MANUAL_AUTO = 0X01, // 焦距自动/手动切换
MG_FOCUS_MANUAL= 0X02,// 手动焦距指令CAMARAPARA,焦距档位根据机芯而言
MG_FOCUS_LOCK = 0X03,// 视场角指令CAMARAPARA,视场角档位根据机芯而言
MG_ZOOM_WIDE_ID = 0X04,// 视场角定速率增大
MG_ZOOM_TELT_ID = 0X05, // 视场角定速率减小
MG_ZOOM_FIX_ID = 0X06, // 视场角锁定
MG_BRIGHT_MANUAL_ID = 0X07, // 手动亮度模式
MG_BRIGHT_AUTO_ID = 0X08, // 自动亮度模式
MG_BRIGHT_LIGHT_ID = 0X09, // 亮度+
MG_BRIGHT_DARK_ID = 0X0A, // 亮度-
MG_CAMERA_RECOR = 0X0B, // 录像
MG_CAMERA_ENHANC = 0X0C, // 图像增强
MG_CAMERA_STEADY = 0X0D, // 图像稳定
MG_CAMERA_SAVE = 0X0E, // 保存光学参数(焦距,亮度及视场角)
MG_CAMERA_OUT_TYPE = 0X0F, // 视频输出类型FCB-H110 X01 1080I/60 0X02 720P/60
MG_IMAGE_TRACT = 0X10, // 图像跟踪/目标跟踪
MG_IMAGE_OSD = 0X11, // OSD显示注意:触发开启或停止
MG_IMAGE_SNAPSHOT = 0X12, // 拍照一张
MG_IMAGE_VISIBLE = 0X13, // 可见光
MG_IMAGE_INFRARED = 0X14, // 红外
MG_IMAGE_Gain_ADD = 0x15, // 增益+ //MG_FOCUS_NEAR = 0X15,// 焦距+
MG_IMAGE_Gain_SUB = 0x16, // 增益- //MG_FOCUS_FAR = 0X16,// 焦距-
MG_IMAGE_OUTPUT_SWITCH = 0x17, // 输出切换(高清/标清) //MG_FOCUS_STOP = 0X17,// 焦距不变
MG_IMAGE_FOLLOW = 0x18, //随动
MG_IMAGE_BLACKWHITE = 0x19, //白热/黑热
MG_IMAGE_MERGE = 0x1a, //融合
MG_IMAGE_ROTATION = 0x1B, //融合
MG_IMAGE_AUTO_FOV = 0x1C, //区域搜索自动设置视场角
MG_IMAGE_CAR_TEST = 0x1D, //车辆检测
//红外相机控制
MG_INFRA_ZOOM_ADD = 0X1E, //(红外相机)电子放大
MG_INFRA_ENHANCE = 0x1F, //(红外相机)图像增强
MG_GEAR_RETRACT = 0X20, // 吊舱收
MG_GEAR_EXTENSION = 0X21, // 吊舱放
MG_PATH_TRACT = 0X22, // 路径跟踪启动(巡线开启,启动跟随)
MG_PATH_NO = 0X23, // 路径跟踪停止(停止巡线)
MG_GNSS_TRACK_ON = 0X24, // 绕指向位置盘旋
MG_GNSS_TRACK_OFF = 0X25, // 取消绕指向位置盘旋
MG_GNSS_CORRECT_ON = 0X26, // 启动GNSS摇杆修正
MG_GNSS_CORRECT_OFF = 0X27, // 取消GNSS摇杆修正
MG_RECORD_ON = 0X28, // 取消GNSS摇杆修正
MG_RECORD_OFF = 0X29, // 取消GNSS摇杆修正
MG_Target_AP_FOV = 0X2A, // 飞控自动调焦
MG_Target_P_ReNew = 0X2B, // 指点飞行(P_ReNew)
MG_INFRA_ENVIRONMENTAL_CORRECTION = 0x40, //背景校正
MG_INFRA_BACKGROUND_CORRECTION = 0x41, //快门校正
MG_INFRA_FILTER = 0x42, //红外滤波
MG_INFRA_LIGHT_ADD = 0x43, //红外亮度+
MG_INFRA_LIGHT_SUB = 0x44, //红外亮度-
MG_INFRA_FOV_ADD = 0x45, //视场+
MG_INFRA_FOV_SUB = 0x46, //视场-
MG_TIME_ZONE_ADJ = 0x47, //时区调整
MG_IMAGE_PUZZLE = 0x4A, //指定视场角:如果cameraParam是0,为拼图视场角;如果cameraParam不是0,为其它视场角,精度0.1,单位角度,MGXXXE-N系列吊舱的视场角范围是2.3~63.7度
MG_IMAGE_PUZZLE_ONOFF = 0x4B, //垂直下视(框架角锁定)
MG_IMAGE_PUZZLE_OBLIQUE = 0x4C, //正射/倾斜
MG_IMAGE_AUTOMATIC_TARGET = 0x4D, //自动检测(AI开启/关闭),参数cameraParam取值,为0时,乒乓开关,为1时,AI开启,为2时AI关闭
MG_IMAGE_MANUAL_SELECT = 0x4E, //手动选择目标
MG_IMAGE_DETECTION_NOT_TRACK = 0x4F, //自动检测模式下,仅检测不跟踪
MG_IMAGE_TRACK_TIME = 0x50, //设置最长跟踪时间camaraPara的值为所设置的值,单位s
MG_IMAGE_REDISCOVER = 0x51, //设置目标跟丢后,重新寻找并跟踪新目标的时间camaraPara的值为所设置的值,单位s
MG_IMAGE_CONTRAST = 0x52, // 调整编码板对比度参数 camaraPara的值为所设置的值,范围0~100
MG_IMAGE_BRIGHTNESS = 0x53, // 调整编码板亮度参数 camaraPara的值为所设置的值,范围0~100
MG_IMAGE_TONE = 0x54, // 调整编码板色调参数 camaraPara的值为所设置的值,范围0~100
MG_IMAGE_SATURATION = 0x55, // 调整编码板饱和度参数 camaraPara的值为所设置的值,范围0~100
MG_IMAGE_PRESETMODE1 = 0X56, // 将编码板对比度、亮度、色调、饱和度参数设置为固定值(70 50 52 52),此值针对"薄雾"情况
MG_IMAGE_PRESETMODE2 = 0X57, // 将编码板对比度、亮度、色调、饱和度参数设置为固定值(65 35 52 52),此值针对"厚雾"情况
MG_IMAGE_HDENCODINGFORMAT = 0x58,// 0x58 可见光发送编码格式 camaraPara的值:0x00:表示无效;0x01:表示H264;0x02:表示H265;
MG_IMAGE_HDSAVEFORMAT = 0X59,// 0X59 可见光保存编码格式 camaraPara的值:0x00:表示无效;0x01:表示H264;0x02:表示H265;
MG_IMAGE_SDENCODINGFORMA = 0x5A,// 0x5A 红外编码格式 camaraPara的值:0x00:表示无效;0x01:表示H264;0x02:表示H265;
MG_IMAGE_HDTRANSMISSIONRATE = 0x5B,// 0x5B 可见光发送码率 camaraPara的值:0x00:表示无效;取值范围为1~6;
MG_IMAGE_HDSTORAGERATE = 0x5C,// 0x5C 可见光存储码率 camaraPara的值:0x00:表示无效;取值范围为1~20;
MG_IMAGE_SDCODERATE = 0X5D,// 0X5D 红外码率 camaraPara的值:0x00:表示无效;取值范围为1~4;
MG_IMAGE_GIMBALRESTART = 0x5E,// 0x5E 吊舱编码板重启
IRAUTOFOCUS,//0x60 红外相机自动聚焦
IRTELEPHOTOMODE,//0x61 红外相机长焦模式
IRSHORTFOCUSMODE,//0x62 红外相机短焦模式
LASEREQUSELFCHECK,//0x63 激光设备自检
LASERTARGETMODE,//0x64 设置首、末、多目标模式 camaraPara的值:0x00:表示无效;0x01:表示首目标模式;0x02:表示末目标模式;0x03:表示多目标模式;
LASERRANGINGMODE,//0x65 测距模式 camaraPara的值:0x00:表示无效;0x01:表示单次测距模式;0x02:表示连续测距模式;0x03:表示停止测距;
LASERRANGINGFREQ,//0x66 设置单次/连续测距频率 camaraPara的值:0x00:表示无效;取值范围(0x01~0x0A)
LASERSINGLERANGENUM,//0x67 单次测距个数 camaraPara的值:0x00:表示无效;取值范围(0x01~0x0A)
LASERMINSTROBEDIST,//0x68 设置最小选通距离 camaraPara的值:0x00:表示无效;取值范围(10~20000)米
LASERQUERYMINSTROBEDIST,//0x69 查询最小选通距离
LASERMAXSTROBEDIST,//0x6A 设置最大选通距离 camaraPara的值:0x00:表示无效;取值范围(10~20000)米
LASERQUERYMAXSTROBEDIST,//0x6B 查询最大选通距离
QUERYFPGAVER,//0x6C 查询 FPGA 软件版本号
QUERYMCUVER,//0x6D 查询 MCU 软件版本号
QUERYHARDWAREVER = 0x6E,//0x6E 查询硬件版本号
POINT_1_UPDATE = 0x6F, //更新靶点坐标
POINT_2_UPDATE = 0x70, //更新弹着点坐标
POINT_Measu_CLEAR = 0x71, //清除靶点和弹着点坐标
MG_PIP_ON = 0x78, //开启画中画dec(120)
MG_PIP_OFF = 0x79, //关闭画中画dec(121)
WHITE_BALANCE = 0x80, //白平衡模式,camaraPara的值:0x00表示全自动曝光,0x01表示户外,0x02户外自动,0x03单次白平衡
SENSOR_SATURATION = 0x87, //饱和度设置,camaraPara的取值范围0-100,50为不设置饱和度
SENSOR_TONE = 0x88, //色调设置,camaraPara的取值范围0-100,50为不设置色调
GIMBAL_MAGNIFI_CTL = 0x89, //吊舱倍率设置,camaraPara表示倍率,取值范围是1-30,最多小数点后一位
IMAGE_PUZZLE = 0x8A, //拼图应用(吊舱垂直下视并锁定拼图视场角)
}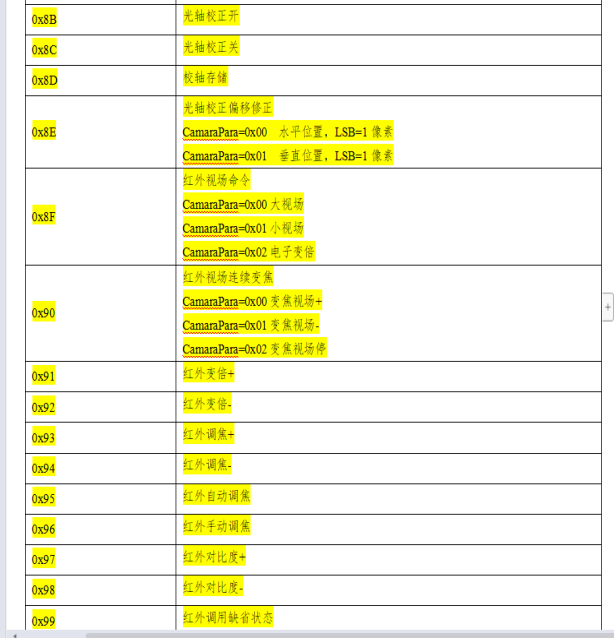
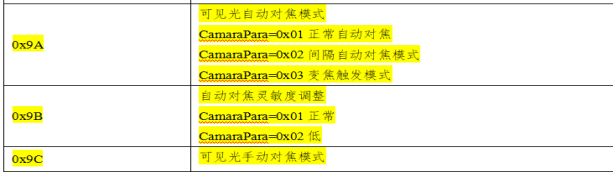
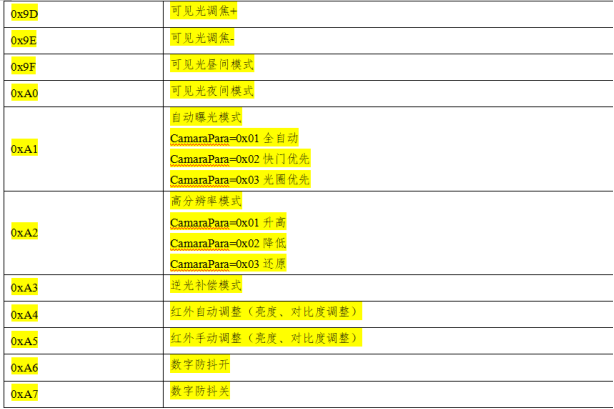
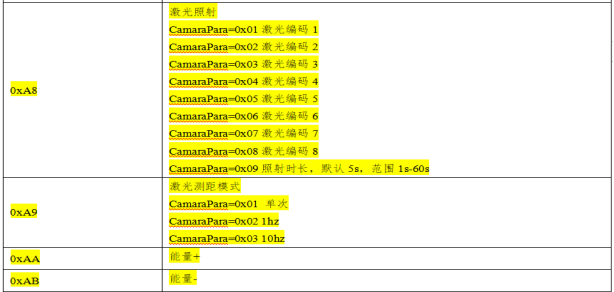
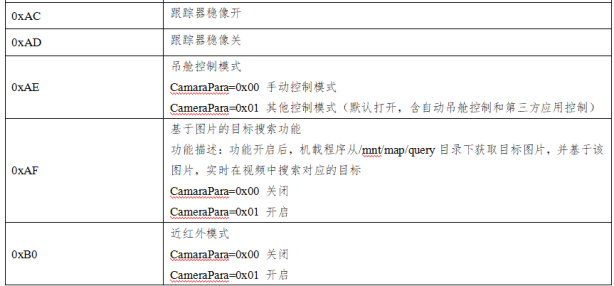
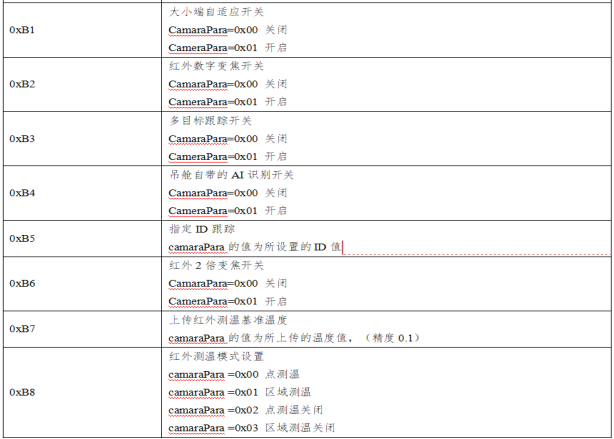
吊舱通用消息(格式化,重启,固定角度锁定框架)(247协议)
通信:MQTT
主题:/gimbalGeneraMsg
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| formatFlag | int | SD卡格式化标志,0x00表示无效,0x01表示格式化,0x02表示清空(暂时没用) |
| restart | int | 重启图像处理板,0x00表示无效,0x01表示重启(暂时没用) |
| frmCtl | int | 框架角锁定指令,0x00表示无效,0x01表示锁定框架角有效 |
| panPara | int | 框架角锁定偏航角值,单位° |
| tiltPara | int | 框架角锁定俯仰角值,单位度 |
| res0 | int | 保留字段 |
json
{
"formatFlag":0;
"restart":0,
"frmCtl":0,
"panPara":40,
"tiltPara":40,
"res0": 0
}//固定值框架角锁定设置MG系列吊舱控制器参数(103协议,暂时没用)
通信:MQTT
主题:/sendGimbalControlParams
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| rateControl | int | 速率控制(1:速率控制 0;角度控制) |
| filterStatus | int | 滤波(1:滤波 0:取消滤波) |
| kpPan | int | 航向控制比例!<1E3 |
| kpTilt | int | 俯仰控制比例 !<1E3 |
| kdPan | int | 航向控制微分!<1E3 |
| kdTilt | int | 俯仰控制微分 !<1E3 |
| kiPan | int | 航向控制积分 !<1E3 |
| kiTilt | int | 俯仰控制积分 !<1E3 |
| thresValueScale | int | 速率阈值增益!<1E3 |
| angleThreshold | int | 角度控制最大值(Rad) !<1E3 |
| gimbalPool | int | 吊舱控制阈值(Rad) !<1E3 |
| frameGap | int | 帧间隔 |
| res | int | 预留 |
| res2 | int | 预留 |
获取MG系列吊舱控制器参数(103协议,暂时没用)
通信:MQTT
主题:/getGimbalControlParams
内容:空
设置吊舱安装参数(暂时没用)
通信:MQTT
主题:/setGimbalInstallParams
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| x | double | 安装轴X距离 |
| y | double | 安装轴Y距离 -m |
| z | double | 安装轴Z距离 -m |
| pitch | double | 俯仰角 -m |
| yaw | double | 偏航角 -m |
| height | double | 高度微调 -m |
获取吊舱安装参数(暂时没用)
通信:MQTT
主题:/getGimbalInstallParams
内容为空
设置吊舱气囊开关(暂时没用)
通信:MQTT
主题:/setGimbalAirbagSwitch
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| onoff | int | 1-开 0-关 |
设置吊舱目标点高度(暂时没用)
通信:MQTT
主题:/setTargetAlt
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| alt | int | 目标点海拔高度 |
设置吊舱模式
通信:MQTT
主题:/setGimbalMode
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| mode | int | 枚举值 |
| onoff | int | 开关:1开;0关 |
java
enum GimbalControlModelEnum
{
Gimbal_CALIBRATE = 0x00, //吊舱校准
Gimbal_SEMI_AUTO = 0x01, //位置半自主模式
Gimbal_TASK_PLAN = 0x02, // 自主航线(RTT-A)
Gimbal_FRAME_LOCK = 0x03, //框架锁定
Gimbal_A2G = 0x04, //速率半自主模式
Gimbal_DEM_ITERATE = 0x05, //高程迭代
Gimbal_RTT_Manual = 0x06, //RTT_Manual
RES_2, //预留
RES_3, //预留
RES_4, //预留
ZONE_SEARCH, //区域搜索
Gimbal_TP_OBSERVE, //临时观察
Gimbal_CT_OBSERVE, //持续观察
Gimbal_RECOVER_SEARCH, //恢复搜索
}设置吊舱视距
通信:MQTT
主题:/setGimbalViewDist
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| data | double | 范围200~2000 |
请求吊舱视距
通信:MQTT
主题:/getGimbalViewDist
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| data | double | 范围200~2000 |
设置横向偏距
通信:MQTT
主题:/setLateralOffset
内容:
| 字段名称 | 类型 | 描述 |
|---|---|---|
| data | int | 横向偏矩值 |
| lineDirect | int | 巡线航线的旋转方向(顺时针:1,逆时针:-1) |
| res | int | 预留值 |
吊舱手动跟踪(247协议)
通信:MQTT
主题:/setGimbalManualTrack
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| x | int | 跟踪图像坐标x,非负数 |
| y | int | 跟踪图像坐标y,非负数 |
| width | int | 跟踪图像范围,非负数 |
| height | int | 跟踪图像范围,非负数 |
| targetFlag | int | 0x00:无效;0x01:进跟踪;0x02:退跟踪; 0x03:指点测温 |
媒体
推流地址推送
主题:/pushStreamUrl
通信:MQTT
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| streamUrl | String | 可见光:如果需要分发的话,传空;如果需要推流的话,传具体的推流地址 |
| sdStreamUrl | String | 红外:如果需要分发的话,传空;如果需要推流的话,传具体的推流地址 |
json
{
"streamUrl": "rtsp://172.30.30.151/123123/JOCLOUD-4378-PLAN202207011813136975"
}开始/停止推送视频流和推遥测
主题:/pushVideoTelemetrySwitch
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| state | int | 0停止,1开启 |
| type | int | 1视频流,2遥测 |
| url | string | 当type为1时使用,可见光:如果需要分发的话,传空;如果需要推流的话,传具体的推流地址 |
| sdUrl | string | 当type为1时使用,红外:如果需要分发的话,传空;如果需要推流的话,传具体的推流地址 |
json
{ "state": 1, "type": 1, "url": "xxx" }流媒体分发相关配置
主题:/distributeCfg
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| hdVideoUrl | string | 高清视频源 |
| sdVideoUrl | string | 标清视频源 |
| httpPort | int | http端口,默认8080 |
| rtcPort | int | webrtc端口,默认8000 |
| hdApp | string | 高清视频流地址的app |
| hdStream | string | 高清视频流地址的stream |
| sdApp | string | 标清视频流地址的app |
| sdStream | string | 标清视频流地址的stream |
json
{"hdVideoUrl":"","sdVideoUrl":"",...}视频录像开关
主题:/videoRecord
通信:MQTT
内容 json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| state | int | 1开,0关 |
| fileName | string | 保存录像的文件的绝对路径,包括文件后缀(.ts),保存的ts流 |
json
{ "state": 1, "fileName": "xxx" }pc反馈视频流状态
主题:/feedbackStreamState
通信:MQTT
内容:json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| state | int | 1流恢复,0超时 |
查询载荷是否可用
主题:/checkPayloadIsAvailable
通信:MQTT
内容:json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| available | int | 载荷是否可用:0不可用,1可用 |
| payloadType | String | 载荷类型(gimbal、camera、lidar) |
json
{
"data": [
{
"payloadType": "gimbal",
"available": 1
},
...
],
"type": "response",
"code": 200
}快照(流媒体SDK)
主题:/snapshot
通信:MQTT
内容:json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| onOff | bool | 是否开启快照,true 开启快照,根据拍照间隔定时拍照;false,关闭快照 |
| snapShotSleepTime | int | 快照拍摄间隔,单位毫秒,eg:1000,每隔1000毫秒拍一次 |
| snapShotServerUrl | string | 上传快照图片的http url,快照保存成功就调用这个url上传快照图片给服务器 |
电子围栏
删除当前所有电子围栏
主题:/removeAllFence
通信:MQTT
内容:空
增加或修改围栏
主题:/addModifyFence
通信:MQTT
内容:json格式,可一次性传多个
| 字段名称 | 类型 | 描述 |
|---|---|---|
| array[json] | ||
| spcType | int | 空域类型:0禁出,1禁入 |
| shape | int | 空域类型:0圆形,1多边形 |
| strategy | int | 规避策略:0默认,1限高,2绕飞,3悬停,4盘旋,5降落,6迫降 |
| spcId | int | 空域ID,即围栏ID |
| maxAlt | int | 顶高(米),无顶高为9999 |
| spcBeginTime | int | 空域开始时分,格式:1259(与spcBeginDate同为0时为无起始时间) |
| spcBeginDate | int | 空域开始年月日,格式:20240307 |
| minAlt | int | 底高(米),无底高为0 |
| spcEndTime | int | 空域结束时分,格式:1259(与spcEndDate同为9999时为无结束时间) |
| spcEndDate | int | 空域结束年月日,格式:20240307 |
| enable | int | 使能:0无使能,1使能 |
| fencePointSize | int | 电子围栏的围栏点个数:圆形为2,n边形就是n,n >= 3,最多为10 |
| errorType | int | 拒绝围栏的原因,pc返回: 0:添加成功 1:围栏功能开关未打开 2:围栏超出无人机航程 3:圆形围栏半径小于等于0 4:多边形围栏点个数大于10 5:多边形围栏点个数小于2 6:多边形围栏点全部共线 7:多边形围栏点自相交 8:起飞后无人机处于禁入围栏二级缓冲区 9:当前围栏缓冲区与其它缓冲区重叠 10:禁出型围栏半径或边长过小(550m) |
| fencePoints | array[json] | 多边形围栏的点的坐标或者圆形围栏的圆心坐标和半径(米) |
| 多边形围栏点的坐标或圆形围栏的圆心坐标 | ||
| lon | double | 经度 |
| lat | double | 纬度 |
| radius | int | 圆形围栏才有的半径,单位m;当空域类型是禁出时,半径至少为550m |
json
{ "type": "request", "data": ["...", "..."] }删除围栏
主题:/removeFence
通信:MQTT
内容:json格式,可一次性传多个
| 字段名称 | 类型 | 描述 |
|---|---|---|
| spcIds | array[int] | 围栏id |
围栏整体功能的开关设置
主题:/fenceSwitch
通信:MQTT
内容:json格式:设置所有围栏的开关状态
| 字段名称 | 类型 | 描述 |
|---|---|---|
| globalSwitch | int | 开关,发给pc:1开,0关 |
| globalSwitchState | int | 飞控上电子围栏实际的开关状态,pc返回:1开,0关 |
请求围栏参数
主题:/getFenceParam
通信:MQTT
内容:json格式,可一次性传多个
| 字段名称 | 类型 | 描述 |
|---|---|---|
| 请求的话,只需要发空域ID | ||
| spcIds | array[int] | 空域ID,即围栏ID |
| array[json]:以下是pc返回的 | ||
| spcType | int | 空域类型:0禁入,1禁出 |
| shape | int | 空域类型:0圆形,1多边形 |
| strategy | int | 规避策略:0默认,1限高,2绕飞,3悬停,4盘旋,5返航,6迫降 |
| spcId | int | 空域ID,即围栏ID |
| maxAlt | int | 顶高(米),无顶高为9999 |
| spcBeginTime | int | 空域开始时分,格式:1259(与spcBeginDate同为0时为无起始时间) |
| spcBeginDate | int | 空域开始年月日,格式:20240307 |
| minAlt | int | 底高(米),无底高为0 |
| spcEndTime | int | 空域结束时分,格式:1259(与spcEndDate同为9999时为无结束时间) |
| spcEndDate | int | 空域结束年月日,格式:20240307 |
| enable | int | 使能:0无使能,1使能 |
| fencePointSize | int | 电子围栏的围栏点个数:圆形为2,n边形就是n,n >= 3,最多为10 |
| errorType | int | 拒绝围栏的原因: 0:添加成功 1:围栏功能开关未打开 2:围栏超出无人机航程 3:圆形围栏半径小于等于0 4:多边形围栏点个数大于10 5:多边形围栏点个数小于2 6:多边形围栏点全部共线 7:多边形围栏点自相交 8:起飞后无人机处于禁入围栏二级缓冲区 9:当前围栏缓冲区与其它缓冲区重叠 10:禁出型围栏半径或边长过小(550m) |
| fencePoints | array[json] | 多边形围栏的点的坐标或者圆形围栏的圆心坐标和半径(米) |
| 多边形围栏点的坐标或圆形围栏的圆心坐标 | ||
| lon | double | 经度 |
| lat | double | 纬度 |
| radius | int | 圆形围栏才有的半径,单位m |
请求所有围栏
主题:/getAllFence
通信:MQTT
内容:json格式,都是pc返回
| 字段名称 | 类型 | 描述 |
|---|---|---|
| fenceTotal | int | 围栏数量 |
| fenceSwitch | int | 围栏整体功能的开关:0关,1开 |
| spcIds | array[int] | 围栏id |
围栏跟航线的检测
主题:/fenceCheck
通信:MQTT
内容:json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| checkResult | int | 0不通过,无法起飞;1通过,可以起飞 |
使能单个电子围栏
主题:/enabledOneFence
通信:MQTT
内容:json格式
| 字段名称 | 类型 | 描述 |
|---|---|---|
| spcId | int | 围栏id,发给pc |
| enabled | int | 围栏使能,发给pc:0无使能,1使能 |
| enabledState | int | 围栏的实际使能状态,pc返回:0关,1开 |
测绘模块
相机相关
设置索尼相机参数
通信:MQTT
主题:/setSonyParam
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| iso | UINT16 | 否 | |
| shutterSpeed | UINT16 | 否 | 快门速度:1~4000 |
| whiteBalanceMode | UINT16 | 否 | 白平衡模式:0~3 |
| focusArea | UINT16 | 否 | 焦点区域:0~3 |
获取索尼相机参数
通信:MQTT
主题:/getSonyParam
内容
| 字段名称 | 类型 | 描述 |
|---|---|---|
| iso | UINT16 | |
| shutterSpeed | UINT16 | 快门速度:1~4000 |
| whiteBalanceMode | UINT16 | 白平衡模式:0~3 |
| focusArea | UINT16 | 焦点区域:0~3 |
发送航拍参数
通信:MQTT
主题:/setAirPhoto
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| photoMode | int | 必填 | 航拍模式,1定时,2为定距, 3定点曝光 4全程定距,与航点拍照属性无关 |
| pushBottomCount | double | 否 | 快门保持时间,单位s, 默认0.01 CA103 0.04 CA102 0.1 2616/16mm 0.12 |
| prePushCount | double | 否 | 快门预按时间,单位s,默认0 |
| timeInterval | double | 否 | 定时拍摄时间,单位s,1.52-10000 |
| distanceInterval | double | 否 | 定距拍摄长度,单位m, 10-100000 |
请求航拍参数
通信:MQTT
主题:/getAirPhoto
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| photoMode | int | 必填 | 航拍模式,1定时,2为定距, 3定点曝光 4全程定距,与航点拍照属性无关 |
| pushBottomCount | double | 必填 | 快门保持时间,单位s |
| prePushCount | double | 必填 | 快门预按时间,单位s |
| timeInterval | double | 必填 | 定时拍摄时间,单位s |
| distanceInterval | double | 必填 | 定距拍摄长度,单位m |
航拍动作指令
通信:MQTT
主题:/sendAirPhotoAction
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| cmd | int | 必填 | 航拍动作,0-无动作,1单拍,2开始连拍, 3停止连拍 |
请求航拍拍摄照片数
通信:MQTT
主题:/getAirPhotoNum
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| data | int | 必填 | 照片数量 |
下载航拍照片数据
通信:MQTT
主题:/downloadAirPhoto
内容
发给pilotController的参数内容
| index | int | 必填 | 需要下载的照片index |
|---|
pilotController发出的参数内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| timeStamp | double | 必填 | |
| lat | double | 必填 | 纬度 |
| lon | double | 必填 | 经度 |
| alt | double | 必填 | 高度 |
| roll | double | 必填 | 滚转 |
| pitch | double | 必填 | 俯仰 |
| yaw | double | 必填 | 偏航 |
| direction | double | 必填 | 偏航 |
| vGND | double | 必填 | 地速 |
| number | int | 必填 | 照片数自驾仪接收到差分板卡的反馈计数 |
请求相机基本信息
通信:MQTT
主题:/getCameraBasicInfo
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| focus | int | 必填 | 主相机焦距,单位mm |
| cCDWidth | double | 必填 | CCD长边,单位mm |
| cCDHeight | double | 必填 | CCD宽边,单位mm |
| serialNum | double | 必填 | 相机序列号 |
| pixelHeight | int | 必填 | Pixel短边,单位pixel |
| pixelWidth | int | 必填 | Pixel长边,单位pixel |
| sortie | int | 必填 | 作业架次 |
| totalTime | int | 必填 | 作业历史时间,单位h |
| photoNum | int | 必填 | 相机总拍照数 |
重启相机
通信:MQTT
主题:/rebootCamera
内容 空
设置CA103旋偏云台
通信:MQTT
主题:/setRainpooCameraControl
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| angle | int | 必填 | -45 度 45 度 云台回中(0度) |
设置睿铂相机控制字段
通信:MQTT
主题:/setRainpooCameraControl
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| camMsgID | int | 必填 | 0x01 开关机消息id 0x03 拍照消息id 0x05 曝光模式消息id |
| param | int | 必填 | cammsgID为0x01时,param:0x00:关机;0x01:开机 cammsgID为0x03时,param:0x00:停止拍照\录像;0x01:开始拍照\录像 cammsgID为0x05时,param:0x00:统一曝光;0x01:60ms 轮询曝光 |
请求睿铂相机控制字段
通信:MQTT
主题:/getRainpooCameraControl
内容
发给pilotController的参数内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| camMsgID | int | 必填 | 0x01 开关机消息id 0x03 拍照消息id 0x05 曝光模式消息id |
pilotController发出去的内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| camMsgID | int | 必填 | 0x01 开关机消息id 0x03 拍照消息id 0x05 曝光模式消息id |
| param | int | 必填 | cammsgID为0x01时,param:0x00:关机;0x01:开机 cammsgID为0x03时,param:0x00:停止拍照\录像;0x01:开始拍照\录像 cammsgID为0x05时,param:0x00:统一曝光;0x01:60ms 轮询曝光 |
获取睿铂相机历史张数
通信:MQTT
主题:/getRainpooCameraPhotoNUM
内容
| xPhotoNum | int | 必填 | X相机拍照张数 |
|---|---|---|---|
| xPhotoNum | int | 必填 | X相机拍照张数 |
| xPhotoNum | int | 必填 | X相机拍照张数 |
| xPhotoNum | int | 必填 | X相机拍照张数 |
| xPhotoNum | int | 必填 | X相机拍照张数 |
| xPhotoNum | int | 必填 | X相机拍照张数 |
| xPhotoNum | int | 必填 | X相机拍照张数 |
| xPhotoNum | int | 必填 | X相机拍照张数 |
获取睿铂相机SN
通信:MQTT
主题:/getRainpooCameraSN
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| sn | string | 必填 | 相机序列号SN |
设置睿铂相机单个参数
通信:MQTT
主题:/setRainpooCameraParam
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| camMsgID | int | 必填 | 0x01 快门值消息id 0x02 ISO 值消息id 0x06 白平衡消息id 0x08 色彩模式消息id |
| param | int | 必填 | cammsgID为0x01时,param:快门值,范围1002000cammsgID为0x02时,param:ISO 值,范围 1003200 cammsgID为0x06时,param:白平衡, 0x01:Auto;0x02:Daylight;0x03:Shade cammsgID为0x08时,param:色彩模式, 0x01:艳丽;0x02:标准 |
| camIndex | int | 必填 | 0x01:A 相机 0x02:D 相机 0x03:S 相机 0x04:W 相机 0x05:X 相机 |
请求睿铂相机单个参数
通信:MQTT
主题:/getRainpooCameraParam
发给pilotController的参数内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| camMsgID | int | 必填 | 0x01 快门值消息id 0x02 ISO 值消息id 0x06 白平衡消息id 0x08 色彩模式消息id |
| camIndex | int | 必填 | 0x01:A 相机 0x02:D 相机 0x03:S 相机 0x04:W 相机 0x05:X 相机 |
pilotController发出去的内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| camMsgID | int | 必填 | 0x01 快门值消息id 0x02 ISO 值消息id 0x06 白平衡消息id 0x08 色彩模式消息id |
| param | int | 必填 | cammsgID为0x01时,param:快门值,范围1002000cammsgID为0x02时,param:ISO 值,范围 1003200 cammsgID为0x06时,param:白平衡, 0x01:Auto;0x02:Daylight;0x03:Shade cammsgID为0x08时,param:色彩模式, 0x01:艳丽;0x02:标准 |
| camIndex | int | 必填 | 0x01:A 相机 0x02:D 相机 0x03:S 相机 0x04:W 相机 0x05:X 相机 |
获取预估可拍照、剩余容量
通信:MQTT
主题:/getRainpooCameraCapacity
发给pilotController的参数内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| camIndex | int | 必填 | 0x01:A 相机 0x02:D 相机 0x03:S 相机 0x04:W 相机 0x05:X 相机 |
pilotController发出去的内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| remainCapacity | double | 必填 | 相机剩余容量,单位0.1GB |
| expectPhotoNum | int | 必填 | 相机预估计可拍照数,单位张 |
| camIndex | int | 必填 | 0x01:A 相机 0x02:D 相机 0x03:S 相机 0x04:W 相机 0x05:X 相机 |
快速设置睿铂相机多个参数
通信:MQTT
主题:/setRainpooCameraParam
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| shutterSpeed | int | 必填 | 快门速度(100-2000) |
| isoVal | int | 必填 | ISO (100~3200) |
| whiteBalance | int | 必填 | 白平衡 0x0001:Auto 0x0002:Daylight 0x0003:Shade |
| colorMode | int | 必填 | 色彩模式 0x0001:艳丽 0x0002:标准 |
| camIndex | int | 必填 | 0x01:A 相机 0x02:D 相机 0x03:S 相机 0x04:W 相机 0x05:X 相机 |
快速获取睿铂相机多个参数
通信:MQTT
主题:/getFastRainpooCameraParam
发给pilotController的参数内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| camIndex | int | 必填 | 0x01:A 相机 0x02:D 相机 0x03:S 相机 0x04:W 相机 0x05:X 相机 |
pilotController发出去的内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| shutterSpeed | int | 必填 | 快门速度(100-2000) |
| isoVal | int | 必填 | ISO (100~3200) |
| whiteBalance | int | 必填 | 白平衡 0x0001:Auto 0x0002:Daylight 0x0003:Shade |
| colorMode | int | 必填 | 色彩模式 0x0001:艳丽 0x0002:标准 |
| camIndex | int | 必填 | 0x01:A 相机 0x02:D 相机 0x03:S 相机 0x04:W 相机 0x05:X 相机 |
请求基站打点位置(CA502)
通信:MQTT
主题:/getGCSBaseInfo
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| lat | double | 必填 | 纬度 |
| lon | double | 必填 | 经度 |
| alt | double | 必填 | 高度 |
| slantHeight | double | 必填 | 天线高度 |
设置基站打点位置(CA502)
通信:MQTT
主题:/setGCSBaseInfo
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| lat | double | 必填 | 纬度 |
| lon | double | 必填 | 经度 |
| alt | double | 必填 | 高度 |
| slantHeight | double | 必填 | 天线高度 |
雷达相关
设置雷达参数(一代飞控JoLiDAR6X(即lidarLR))
通信:MQTT
主题:/setLidarParamsV1
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| flySpeed | int | 必填 | 速度 |
| height | int | 必填 | 高度 |
| ppr | int | 必填 | 扫描频率 |
设置雷达参数(二代飞控)
通信:MQTT
主题:/setLidarParamsV2
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| lidarType | int | 必填 | 0x00:LR22S(南方测绘) 0x01:120(中测瑞格) 0x02:L1500(珞珈依云) 0x03:300p(奥伦达) |
| startDeg | double | 必填 | 起始扫描角度 |
| ppr | int | 必填 | 扫描频率,单位khz |
| scanDeg | double | 必填 | 扫描角度,雷达视场角 安装到飞机里的实际视场角 |
| lineSpeed | double | 必填 | 线速度 |
| pprMode | int | 必填 | 扫描频率工作模式: 0:full(默认) 1:reduce |
获取雷达参数(二代飞控)
通信:MQTT
主题:/getLidarParamsV2
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| lidarType | int | 必填 | 0x00:LR22S(南方测绘) 0x01:120(中测瑞格) 0x02:L1500(珞珈依云) 0x03:300p(奥伦达) |
| startDeg | double | 必填 | 起始扫描角度 |
| ppr | int | 必填 | 扫描频率,单位khz |
| scanDeg | double | 必填 | 扫描角度,雷达视场角 安装到飞机里的实际视场角 |
| lineSpeed | double | 必填 | 线速度 |
| pprMode | int | 必填 | 扫描频率工作模式: 0:full(默认) 1:reduce |
设置雷达开关控制(一代飞控JoLiDAR6X(即lidarLR))
通信:MQTT
主题:/setLidarSwitchV1
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| type | int | 必填 | 0x00,system, !!!in fly mode, no shutdown allowed 系统控制 0x01,lidar, 雷达存储 0x02,imu, 0x03,camera, 0x04,lidarvroadcast, 0x05,lidar save. POS存储 |
| action | int | 必填 | 1,off, 2,act. |
设置雷达开关控制(二代飞控)
通信:MQTT
主题:/setLidarControlV2
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| type | int | 必填 | 0x00:LR22S(南方测绘) 0x01:120(中测瑞格) 0x02:L1500(珞珈依云) 0x03:300p(奥伦达) |
| flag | int | 必填 | 0X0:system total control (系统控制开关) 0X1: POS save data (pos数据存储开关) 0X2: lidar save data (激光数据开关) 0x3: carmera control (相机控制开关) 0x4: Lidar control (激光控制开关) 0x5: IMU control (IMU控制开关) |
| onOff | int | 必填 | 0x01 off 0x02 on |
设置雷达相机参数
通信:MQTT
主题:/setLidarCameraParam
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| lidarType | int | 必填 | 0x00:LR22S(南方测绘) 0x01:120(中测瑞格) 0x02:L1500(珞珈依云) 0x03:300p(奥伦达) |
| mode | int | 必填 | 拍照模式 0:定时模式、1:定距模式、2:连续定距 |
| value | double | 必填 | 拍照参数 定时模式:拍照时间间隔单位:秒 定距模式:拍照距离间隔单位:m |
| width | double | 必填 | 拍照脉冲宽度单位:秒 |
| polarity | int | 必填 | 拍照脉冲极性 0 negative 1 positive |
获取雷达相机参数
通信:MQTT
主题:/getLidarCameraParam
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| lidarType | int | 必填 | 0x00:LR22S(南方测绘) 0x01:120(中测瑞格) 0x02:L1500(珞珈依云) 0x03:300p(奥伦达) |
| mode | int | 必填 | 拍照模式 0:定时模式、1:定距模式、2:连续定距 |
| value | double | 必填 | 拍照参数 定时模式:拍照时间间隔单位:秒 定距模式:拍照距离间隔单位:m |
| width | double | 必填 | 拍照脉冲宽度单位:秒 |
| polarity | int | 必填 | 拍照脉冲极性 0 negative 1 positive |
文件回传模块
概述
下载机载图片、视频等文件到机库,再从机库上传图片、视频等文件到服务器。
fileType字段表
以下mqtt接口的fileType字段的值
| 值 | 描述 | 文件下载路径 |
|---|---|---|
| image | 吊舱图片:pc返回的是文件 | NX:/mnt/sdcard/VIDEO |
| image_sony | 索尼相机:pc返回的是目录 | 根据实际挂载的路径 |
| image_five | 五拼相机:pc返回的是目录 | 根据实际挂载的路径 |
| video | 机载视频:pc返回的是文件 | NX:/mnt/sdcard/VIDEO |
| lidar | 雷达数据:pc返回的是目录 | lidar1000:/ |
| ins | 惯导数据:pc返回的是文件 | /mnt/sdcard/jo_lidar |
| pos | 照片pos数据:pc返回的是文件 | 飞控http服务ip,端口(默认是9800),默认是飞控的ip,eg:http://10.0.0.1:9800; |
| rover | 机载rover数据:pc返回的是文件 | 飞控http服务ip,端口(默认是9800),默认是飞控的ip,eg:http://10.0.0.1:9800; |
| black_box | 黑匣子数据,pc返回的文件 | 二代飞控http服务ip,端口(默认是9800),默认是飞控的ip,eg:http://10.0.0.1:9800; |
| 一代飞控:串口 | ||
| pps_gcs1000 | 基站GCS1000的pps数据 | 基站ip,eg:http://x.x.x.x:x |
| dat | 回放数据 | dat文件所处的目录 |
配置数据回传的服务器ip等
通信:MQTT
主题:/backhaulCfg
请求内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| endpoint | String | 服务器的IP和端口,比如127.0.0.1:6888 |
| userName | String | 服务器的用户名,使用base64加解密 |
| passwd | String | 服务器的密码,使用base64加解密 |
| taskId | String | 任务ID |
| bucketName | String | 一级存储路径名称,比如桶名称 |
通知pilot-controller上传数据
通信:MQTT
主题:/noticeUploadFile
请求内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| tryCount | int | pc数据下载、回传失败时候的重试次数 |
| operType | int | 0是下载和回传,1只下载到本地,2是只回 传到oss;默认是0 |
| fileType | String | 数据类型(参考6.1.1) |
| lidarType | int | 非必填,雷达类型,需要获取雷达数据时,传该值: lidar120:1 lidar1000:2 lidar1350:3 lidar1500:4 LR:5 LR22S:6 |
| pathPrefix | String | 保存到oss的路径前缀,不包含桶名称 |
| taskId | String | 任务ID |
| downloadPath | string | 必填,源文件的下载路径,参考6.1.1 |
| filePathLists | Array[json] | 数据的绝对路径所组成的数组:获取数据列表时返回 |
| 单个json的内容 | ||
| isFile | int | 1文件,0目录 |
| path | string | 文件或目录的路径:pos和rover数据,只需要传文件名 |
pc上报文件回传的结果
通信:MQTT
主题:/setFileUploadResult
返回内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| isSucceed | int | 是否下载或上传成功:0成功,1下载失败,2上传失败 |
| failedFilePath | String | 失败的文件的机载路径 |
| taskId | String | 任务ID |
| url | String | 上传文件后返回的地址 |
| type | String | 文件类型(参考6.1.1) |
获取机载的数据列表
通信:MQTT
主题:/getFileList
请求内容
| 字段 | 类型 | 描述 |
|---|---|---|
| fileType | String | 数据类型(参考6.1.1) |
| isFile | int | 1文件,0目录 |
| lidarType | int | 非必填,雷达类型,需要获取雷达数据时,传该值: lidar120:1 lidar1000:2 lidar1350:3 lidar1500:4 LR:5 LR22S:6 |
| taskId | String | 任务ID |
| downloadPath | string | 必填,源文件的下载路径,参考6.1.1 |
返回内容
| 字段 | 类型 | 描述 |
|---|---|---|
| fileType | String | 数据类型(参考6.1.1),请求参数 |
| lidarType | int | 非必填,雷达类型才会返回 |
| taskId | String | 任务ID,请求参数 |
| downloadPath | string | 请求时发的什么,就返回什么 |
| filePathLists | array[json] | 返回参数 |
| 文件或目录的信息 | ||
| filePath | string | 文件或目录的绝对路径:当fileType是dir时,是目录路径 |
| lastTime | string | 文件最近一次的修改时间 |
| fileSize | string | 文件大小,单位字节,只有是文件时才有 |
| isFile | int | 1文件,0目录 |
| fileTotal | int | 文件数量:当返回目录时,是每个目录内文件的数量 |
示例
json
{"data":{"fileType":"iamge","taskId":"xxx"},"type":"request"}
{"data":{"filePathLists":["aaa","bbb"...],"fileType":"iamge","taskId":"xxx"},"type":"response","code":200}请求回传进度
通信:MQTT
主题:/getBackhaulProgress
内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| progressVal | int | 回传进度值:0~100 |
| progressState | int | 当前数据回传处于哪个状态:0:当前不存在任务,1:下载数据,2:回传数据,3:回传完成 |
| fileType | String | 数据类型(参考6.1.1) |
| taskId | String | 任务ID |
请求pc当前这一组数据(通知pc上传数据时所传的那些数据)的回传进度
pc上报数据回传当前状态
通信:MQTT
主题:/noticeBackhaulState
内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| progressState | int | 当前数据回传处于哪个状态:1:下载数据,2:回传数据,3:回传完成 |
| fileType | String | 数据类型(参考6.1.1) |
| taskId | String | 任务ID |
pc主动上报当前这一组数据(通知pc上传数据时所传的那些数据)的状态
删除机载数据
通信:MQTT
主题:/deleteBoardFile
内容:
| 字段 | 类型 | 描述 |
|---|---|---|
| filePathLists | StringArray | 机载数据的绝对路径 |
| fileType | String | 数据类型(参考6.1.1) |
| taskId | String | 任务ID |
请求下载数据文件列表
通信:HTTP,均支持 POST/GET 方式
主题:http://127.0.0.1:8088/api/getFlieList
内容
request:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| dataName | string | 必填 | 文件类型名字 POS 照片POS数据 ROVER 机载ROVER数据 PPS_GCS1000 基站GCS1000PPS数据 PPS_GCS202 基站GCS202 PPS数据 LIDAR 激光雷达数据 INS 惯导数据 BLACK_BOX 黑匣子数据 |
| vehicleModel | string | 必填 | 飞机型号,英文字母大写,可为CW-007或CW_007, CW_007 CW_10, CW_15, CW_15II, CW_20, CW_25, CW_25E, CW_30, CW_100, PH_25 |
| lidarType | int | 否 | 雷达类型,需要获取雷达数据时,传该值: lidar120:1 lidar1000:2 lidar1350:3 lidar1500:4 LR:5 LR22S:6 |
| pageNo | int | 否 | 页码,默认为1 |
| pageSize | int | 否 | 单页文件数,默认为10 |
| sort | int | 否 | 文件时间排序方式 0 升序, 1-降序,默认为1 |
| httpIpPort | string | 否 | 飞控http服务 ip:端口(默认是9800),默认就是飞控的,eg:http://10.0.0.1:9800; 当需要获取雷达数据时,该字段传雷达ip或者目录路径 |
| serialPortName | string | 否 | 串口名称 |
| startIndex | int | 否 | 连接基站下载POS数据,起始序号 |
| endIndex | int | 否 | 连接基站下载POS数据,结束序号 |
| baud | int | 否 | 波特率 |
response:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| code | int | 必填 | 状态码 0 成功 -1 业务代码执行失败 -2 未成功连接飞控 -300 参数不合法 -400 代码抛异常 |
| msg | string | 必填 | 失败的时候显示具体错误信息,成功显示success |
| data | json | 必填 | |
| data 里的json数据如下 | |||
| count | int | 必填 | 文件总数 |
| fileList | array[json] | 必填 | 文件列表 |
| fileList 列表里的json数据如下 | |||
| fileName | string | 必填 | 文件名 |
| lastTime | int | 必填 | 文件最后的修改时间 |
| fileSize | int | 必填 | 文件大小,单位字节 |
| dirName | string | 否 | 该文件所属目录 |
下载数据文件
通信:HTTP,均支持 POST/GET 方式
主题:http://127.0.0.1:8088/api/downloadFile
内容
request:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| dataName | string | 必填 | 文件类型名字 POS 照片POS数据 ROVER 机载ROVER数据 PPS_GCS1000 基站GCS1000PPS数据 PPS_GCS202 基站GCS202 PPS数据 LIDAR 激光雷达数据 INS 惯导数据 BLACK_BOX 黑匣子数据 |
| vehicleModel | string | 必填 | 飞机型号,英文字母大写,可为CW-007或CW_007, CW_007 CW_10, CW_15, CW_15II, CW_20, CW_25, CW_25E, CW_30, CW_100, PH_25 |
| fileName | string | 必填 | 文件名字 |
| lidarType | int | 否 | 雷达类型,需要获取雷达数据时,传该值: lidar120:1 lidar1000:2 lidar1350:3 lidar1500:4 LR:5 LR22S:6 |
| dirName | string | 否 | 当前文件所属目录:请求文件列表时返回;如果有返回就传,没有返回就不传 |
| httpIpPort | string | 否 | 飞控http服务 ip、端口(默认是9800),默认就是飞控的,eg:http://10.0.0.1:9800; 当需要获取雷达数据时,该字段传雷达ip或者目录路径 |
| serialPortName | string | 否 | 串口名称 |
| baud | int | 否 | 波特率 |
response:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| code | int | 必填 | 状态码 0 成功 -1 业务代码执行失败 -2 未成功连接飞控 -300 参数不合法 -400 代码抛异常 |
| msg | string | 必填 | 失败的时候显示具体错误信息,成功显示success |
| data | json | 否 |
请求数据回传进度
通信:HTTP,均支持 POST/GET 方式
主题:http://127.0.0.1:8088/api/getBackhaulProgress
内容
request:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| dataName | string | 必填 | 文件类型名字 POS 照片POS数据 ROVER 机载ROVER数据 PPS_GCS1000 基站GCS1000PPS数据 PPS_GCS202 基站GCS202 PPS数据 LIDAR 激光雷达数据 INS 惯导数据 BLACK_BOX 黑匣子数据 |
| vehicleModel | string | 必填 | 飞机型号,英文字母大写,可为CW-007或CW_007, CW_007 CW_10, CW_15, CW_15II, CW_20, CW_25, CW_25E, CW_30, CW_100, PH_25 |
response:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| code | int | 必填 | 状态码 0 成功 -1 业务代码执行失败 -2 未成功连接飞控 -300 参数不合法 -400 代码抛异常 |
| msg | string | 必填 | 失败的时候显示具体错误信息,成功显示success |
| data | json | 必填 | |
| data 里的json数据如下 | |||
| progressVal | int | 必填 | 进度值,单位% |
多旋翼
精准降落开关
通信:MQTT
主题:/sendLandingStateSwitch
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| cmd | int | 必填 | 0 关,1开 |
设置控制是否生效
通信:MQTT
主题:/setPadControlEnabled
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| enabled | int | 必填 | 1解锁,2锁定 |
获取控制状态
通信:MQTT
主题:/getPadControlEnabled
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| enabled | int | 必填 | 1解锁,2锁定 |
无人机控制(遥感控制油门、方向,升降,副翼)
通信:MQTT
主题:/setPadControlCmd
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| ailCmd | int | 必填 | 副翼 |
| eleCmd | int | 必填 | 升降 |
| thrCmd | int | 必填 | 油门 |
| rudCmd | int | 必填 | 方向 |
FPV视频推流功能开关及推流地址指令;反向设置推流ip
通信:MQTT
主题:/setFPVStreamCtrl
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| fpvPermit | int | 必填 | fpvPermit赋值为0,表示控制FPV的开关 ,val1表示开关(0-关,1-开); fpvPermit赋值为1表示推流IP地址,val1~val4表示分别表示IP的各个位; 吊舱而言,如果fpvPermit赋值为0,吊舱不用做任何处理。如果接收到的fpvPermit为1,吊舱获取值,按获取的值赋值推流IP即可。 |
| val1 | int | 必填 | |
| val2 | int | 必填 | |
| val3 | int | 必填 | |
| val4 | int | 必填 |
照明
通信:MQTT
主题:/sendLightCMD
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| type | int | 必填 | 0-关闭 1-开启 2-爆闪 3-常亮 |
| cmd | int | 否 | 默认为1 |
喊话器开关
通信:MQTT
主题:/sendMegaphoneOpen
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| cmd | int | 必填 | cmd = 1 开 cmd = 0 关 |
喊话器音色/音速设置
通信:MQTT
主题:/sendMegaphoneVoiceSpeed
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| cmd | int | 必填 | cmd = 1;音色;speeddata :音色代码; cmd = 0:音速;speeddata:音速代码 |
| speedData | int | 必填 |
喊话器实时语音
通信:MQTT
主题:/sendMegaphoneVoiceData
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| data | string | 必填 | 语音文本 |
| dataLen | int | 必填 | 文本长度 |
喊话器文本传输内容
通信:MQTT
主题:/setMegaphonePlaytxt
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| text | string | 必填 | 语音文本 |
喊话器测试1
通信:MQTT
主题:/sendMegaphoneTest1
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| cmd | int | 否 | cmd 默认为1;今天天气很好 |
喊话器测试2
通信:MQTT
主题:/sendMegaphoneTest2
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| cmd | int | 否 | cmd 默认为1 |
电子围栏参数设置与获取
通信:MQTT
主题:/setElectronicFence
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| action | int | 必填 | 操作:0增加;1修改;2删除;3请求 |
| spcType | int | 必填 | 空域类型:0禁入;1禁出 |
| shape | int | 必填 | 空域形状 0:圆形;1:多边形 |
| strategy | int | 必填 | 规避策略:0默认;1限高;2绕飞;3悬停;4盘旋;5返航;6:迫降 |
| spcID | int | 必填 | 空域ID |
| maxAlt | int | 必填 | /顶高(米),无顶高为9999 |
| sTime | int | 必填 | 空域开始时分,格式:1259(与S_Day同为0时为无起始时间) |
| sDay | int | 必填 | 空域开始年月日,格式:20231213 |
| minAlt | int | 必填 | 底高(米),无底高为0 |
| eGNSSWeek | int | 必填 | 空域结束时分,格式:1259(与E_Day同为9999时为无结束时间) |
| eGNSSTow | int | 必填 | 空域结束年月日,格式:20231213 |
| efencePoints | array[obj] | 必填 | 多边形电子围栏围栏坐标 / 圆形电子围栏圆心与半径(米)(1,2位,无用位为0),size为20 |
| efencePoints里的单个json格式如下 | |||
| lon | double | 必填 | 经度 |
| lat | double | 必填 | 纬度 |
返回的电子围栏结构如下
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| efenceDatas | array[obj] | 必填 | 电子围栏列表 |
| efenceDatas里的单个json格式如下: | |||
| action | int | 必填 | 操作:0增加;1修改;2删除;3请求 |
| spcType | int | 必填 | 空域类型:0禁入;1禁出 |
| shape | int | 必填 | 空域形状 0:圆形;1:多边形 |
| strategy | int | 必填 | 规避策略:0默认;1限高;2绕飞;3悬停;4盘旋;5返航;6:迫降 |
| spcID | int | 必填 | 空域ID |
| maxAlt | int | 必填 | /顶高(米),无顶高为9999 |
| sTime | int | 必填 | 空域开始时分,格式:1259(与S_Day同为0时为无起始时间) |
| sDay | int | 必填 | 空域开始年月日,格式:20231213 |
| minAlt | int | 必填 | 底高(米),无底高为0 |
| eGNSSWeek | int | 必填 | 空域结束时分,格式:1259(与E_Day同为9999时为无结束时间) |
| eGNSSTow | int | 必填 | 空域结束年月日,格式:20231213 |
| efencePoints | array[obj] | 必填 | 多边形电子围栏围栏坐标 / 圆形电子围栏圆心与半径(米)(1,2位,无用位为0),size为20 |
| efencePoints里的单个json格式如下 | |||
| lon | double | 必填 | 经度 |
| lat | double | 必填 | 纬度 |
发送RTK数据
通信:MQTT
主题:/setRtkRawData
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| data | string | 必填 | 文本 |
| dataLen | int | 必填 | 文本长度 |
设置巡逻时间
通信:MQTT
主题:/setMissionLeftTime
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| missionTimeOut | int | 必填 | 单位S 大于0为有效值 |
设置巡航区巡逻趟数
通信:MQTT
主题:/setCruiseMissionLeftNum
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| cruiseMissionLeftNum | int | 必填 | -1 无效 |
设置防控区巡逻趟数
通信:MQTT
主题:/setPreCtrlMissionLeftNum
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| preCtrlMissionLeftNum | int | 必填 | -1 无效 |
获取区域巡检参数
通信:MQTT
主题:/getCruiseMissionLeft
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| deviceID | int | 否 | 设备ID 0x01 |
| msgID | int | 否 | 0x04 |
| missionTimeOut | int | 必填 | 总任务巡逻时间,单位S,大于0为有效值 |
| cruiseMissionLeftNum | int | 必填 | 巡航区巡逻趟数,-1无效 |
| preCtrlMissionLeftNum | int | 必填 | 防控区巡逻趟数,-1无效 |
巡查无人机任务规划协议
通信:MQTT
主题:/setCruiseMissionLeft
内容
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| deviceID | int | 否 | 设备ID 0x0C |
| msgID | int | 否 | 0x04 |
| isEnd | int | 必填 | 任务是否结束,0:默认未执行任务;1:执行任务;2:任务结束 |
| doCommd | int | 必填 | 处置指令,0:不处置;1:处置;2:处置但不调用设备,默认0 |
| targetID | int | 必填 | 需要跟踪的目标ID号 |
| doTime | int | 必填 | 处置时长 |
遥控器8方向遥控
通信:MQTT
主题:/setRemoteControl
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| 1. aileron | int | 是 | 副翼,范围[1000,2000],1500为摇杆居中;半自动模式下控制水平左右速度,大于1500无人机水平右移;小于1500无人机水平左移(Y轴向右) |
| 2. elevator | int | 是 | 升降,范围[1000,2000],1500为摇杆居中;半自动模式下控制水平前后速度,大于1500无人机水平前移;小于1500无人机水平后移(X轴向前) |
| throttle | int | 是 | 油门,范围[1000,2000],1500为摇杆居中;半自动模式下控制水平垂直速度,大于1500无人机垂直上升;小于1500无人机垂直向下 |
| rudder | int | 是 | 方向,范围[1000,2000],1500为摇杆居中;半自动模式下控制Z轴旋转速度,大于1500无人机正方向转动;小于1500无人机负方向转动(Z轴向下) |
| manual | int | 是 | 1manual; 0auto; 2半自主 |
| ipb | int | 是 | 功能指令engine ignition 0x1 Parachute 0x02 Brake 0x04 |
| flap | int | 是 |
播放指定音频文件
通信:MQTT
主题:/setMegaphonePlayAudioByName
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| fileName | string | 是 | 文件名 |
喊话器音频停止播放
通信:MQTT
主题:/setMegaphoneStopPlay
内容:
喊话器音量调整
通信:MQTT
主题:/setMegaphoneVolumeAdjust
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| volume | int | 是 | 音量设置范围0-100,0为静音 |
获取音频列表
通信:MQTT
主题:/getMegaphoneAudiolist
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| filePathLists | array[string] | 是 | 音频列表 |
喊话器查询音量
通信:MQTT
主题:/getMegaphoneVolumeStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| volume | int | 是 | 音量设置范围0-100,0为静音 |
喊话器播放状态
通信:MQTT
主题:/getMegaphonePlayStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| status | int | 是 |
喊话器播放文件名查询
通信:MQTT
主题:/getMegaphonePlayFileStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| fileName | string | 是 | 文件名 |
喊话器是否开启循环查询
通信:MQTT
主题:/getMegaphoneReplayStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| replayStatus | int | 是 | 喊话器是否开启循环0关闭,1开启 |
喊话器俯仰调整
通信:MQTT
主题:/setMegaphonePitchingAdjust
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| pitching | int | 是 | [-90,0] |
探照灯控制模式切换(随动)
通信:MQTT
主题:/setLightControlMode
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| controlMode | int | 是 | 0独立控制,1跟随吊舱 |
探照灯俯仰调整
通信:MQTT
主题:/setLightPitchingAdjust
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| pitching | int | 是 | [-90,30] |
探照灯偏航控制
通信:MQTT
主题:/setLightHeadingAdjust
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| heading | int | 是 | [-90,90] |
灯光温度查询
通信:MQTT
主题:/getLightTemperatureStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| temperature | int | 是 |
灯光角度查询
通信:MQTT
主题:/getLightAngleStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| pitch | int | 是 | 俯仰值 |
| heading | int | 是 | 偏航值 |
灯光模式查询
通信:MQTT
主题:/getLightInfoStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| frequency | int | 是 | 灯光频率 |
| mode | int | 是 | 灯光模式(0关、1爆闪、2常亮) |
| luminance | int | 是 | 灯光亮度 |
设置抛投器功能
通信:MQTT
主题:/setThrowerCtrl
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| funcType | int | 是 | 0-连接发送请求 1-抛投前 2-抛投后 3-抛投左 4-抛投右 5-抛投全部 6-顺序抛投 7-开启激光器 8-关闭激光器 |
获取抛投器状态
通信:MQTT
主题:/getThrowerCtrlStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| front | bool | 是 | 前挂状态 |
| rear | bool | 是 | 后挂状态 |
| left | bool | 是 | 左挂状态 |
| right | bool | 是 | 右挂状态 |
获取抛投器激光状态
通信:MQTT
主题:/getThrowerLaserStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| laserState | bool | 是 | 激光状态 |
喊话器开启循环播放
通信:MQTT
主题:/setMegaphoneOpenReplay
内容:
喊话器关闭循环播放
通信:MQTT
主题:/setMegaphoneCloseReplay
内容:
喊话器播放上一曲
通信:MQTT
主题:/setMegaphoneBackPlay
内容:
喊话器播放下一曲
通信:MQTT
主题:/setMegaphoneNextPlay
内容:
喊话器暂停播放
通信:MQTT
主题:/setMegaphonePausePlay
内容:
喊话器继续播放
通信:MQTT
主题:/setMegaphoneContinuePlay
内容:
探照灯亮度设置
通信:MQTT
主题:/setLightLuminanceAdjust
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| luminance | int | 是 | 亮度设置范围0-100 |
获取探照灯控制模式
通信:MQTT
主题:/getLightControlMode
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| controlMode | int | 是 | 0独立控制,1跟随吊舱,其它 |
探照灯频率控制
通信:MQTT
主题:/setLightFrequencyAdjust
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| frequency | int | 是 | 频率设置范围0-100 |
喊话器视频控制
通信:MQTT
主题:/setMegaphoneFpvStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| fpv_enable | int | 是 | 0 fpv异常,1 fpv正常 |
删除指定音频文件
通信:MQTT
主题:/deleteMegaphoneFile
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| fileName | string | 是 | 音频文件名 |
设置远程识别模块状态
通信:MQTT
主题:/setRemoteIdModuleStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| sysStatus | int | 是 | 0 未声明,1 飞机地面,2 飞机升空,3 飞机紧急情况,4 远程模块系统故障 |
获取远程识别模块状态
通信:MQTT
主题:/getRemoteIdModuleStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| sysStatusGet | int | 是 | 0 未声明,1 飞机地面,2 飞机升空,3 飞机紧急情况,4 远程模块系统故障 |
设置航向控制
通信:MQTT
主题:/setHeadingControl
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| int | 是 | 0 顺时针转动10deg,1 逆时针转动10deg |
设置毫米波雷达参数
通信:MQTT
主题:/setRadarPara
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| int | 是 | 指示所控制的雷达,0x01:前视 0x02:下视 0x03:左视 0x04:右视 0x05:后视 | |
| cmd | int | 是 | 功能枚举 |
| threshold | int | 否 | cmd为1时,为避障阈值 |
| int | 否 | cmd为1时,为最大爬升高度 |
请求毫米波雷达参数
通信:MQTT
主题:/getRadarPara
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| int | 否 | 指示所控制的雷达,0x01:前视 0x02:下视 0x03:左视 0x04:右视 0x05:后视 | |
| cmd | int | 否 | 功能枚举 |
| threshold | int | 否 | cmd为1时,为避障阈值 |
| int | 否 | cmd为1时,为最大爬升高度 |
查询抓捕网状态
通信:MQTT
主题:/getCaptureNetStatus
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| bool | 否 | true:成功获取抓捕网状态 false:未获取到抓捕网状态 | |
| bulletStatus | int | 否 | 弹药状态 |
| bulletNum | int | 否 | 抓捕网数量 |
| int | 否 | 云台偏航角 | |
| int | 否 | 云台俯仰角 |
若有收获,就点个赞吧
抓捕网的功能枚举控制
通信:MQTT
主题:/setCaptrueNetBaseFuncEnum
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| int | 是 | 0 .向上 1.向下 2.向左 3.向右 4.发射抓捕网 |
抓捕网控制(透传接口)
通信:MQTT
主题:/setCaptureNetCMD
内容:
| 字段名称 | 类型 | 是否必填 | 描述 |
|---|---|---|---|
| UINT16 | 是 | 0x0000 查询抓捕网状态, 0x0001,云台俯仰控制0x0002,云台偏航控制0x5A5A,发射抓捕网 | |
| param | INT16 | 是 | 云台俯仰、偏航:+-1800发射抓捕网:0x5A5A |