
Appearance
[TOC]
云平台接口协议(v1.0.0)
注
- http接口统一前缀为**/api**.例如:提供服务器ip和端口为127.0.0.1:9999,则访问登录接口为http://127.0.0.1:9999/api/uaa/login/form。
0.文档阅读指引
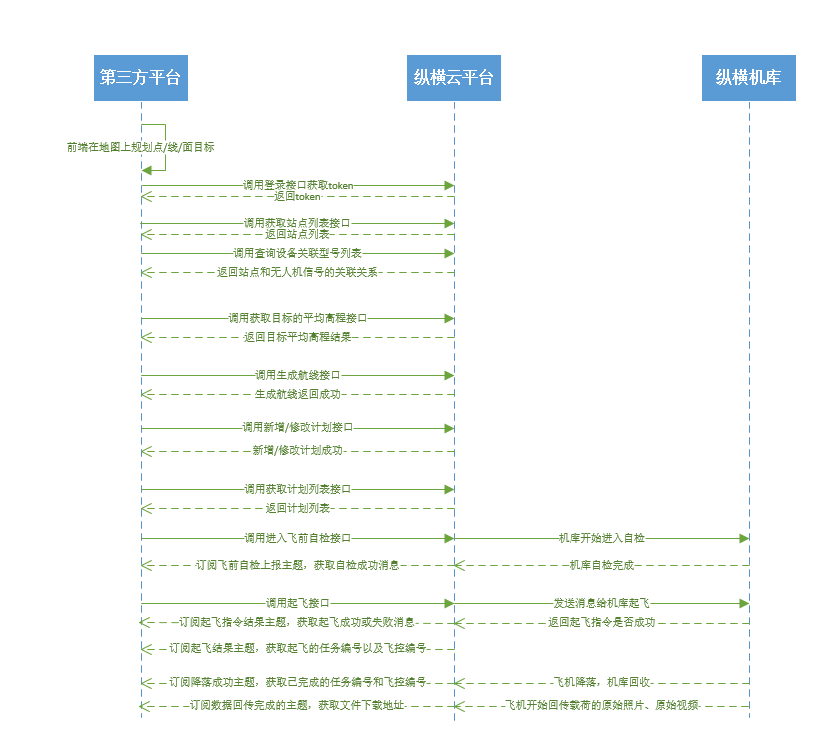
- 在开始阅读请,请先查看本节,了解整体的交互时序和关键接口。
**1.**登录
1.1 接口地址
POST:/uaa/login/form
1.2 请求数据类型
form-data
1.2 响应数据类型
/
1.3 备注
除登录外接口都需要在 Headers 中添加 Authorization 参数,该参数值见登录接口返回结果
1.4 请求参数
| 参数名称 | 参数说明 | 必须 | 数据类型 |
|---|---|---|---|
| username | 用户名 | true | string |
| password | 密码 | true | string |
1.5 响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer (in t32) | integer (in t32) | |
| data | object | ||
| Authorization | 登录 token | string | |
| refresh_token | 刷新 token | string | |
| expires_in | 过期时间(毫秒) | integer | |
| msg | string |
1.6 响应示例
json
{
"code": 200,
"data": {
"Authorization": "bearer b1e17f0d-e4f9-46bb-bb1c-b550ce8c482b",
"refresh_token": "f730abe2-d9e0-4ed8-a508-dd6338127a7e",
"expires_in": 24587829000,
"msg": ""
}
}2 设备管理
2.1 获取机库列表
接口地址
GET /device/v1/site/list
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 |
|---|---|---|---|---|
| address | 位置 | query | false | string |
| customName | 自定义名称 | query | false | string |
| isOrderByDefault | query | false | boolean | |
| pageNo | query | false | integer(int32) | |
| pageSize | query | false | integer(int32) | |
| siteSn | 编号 | query | false | string |
| typeId | 站点类型 | query | false | integer(int64) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«BaseListVO«SiteListVO»» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | BaseListVO«SiteListVO» | BaseListVO«SiteListVO» | |
| count | integer(int64) | ||
| list | array | SiteListVO | |
| address | 位置 | string | |
| createdAt | 创建时间 | string | |
| customName | 自定义名称 | string | |
| gcs | gcs1000开关状态 | boolean | |
| hangarFversion | 主控M1程序版本号 | string | |
| height | 高度 | number | |
| id | id | integer | |
| imageTransmission | 图传开关状态 | boolean | |
| isHaveUrgentPlan | 是否创建应急任务 | boolean | |
| isOnline | 是否在线 0离线 1在线 2更新中 | integer | |
| isUpdate | 是否更新 | boolean | |
| latitude | 纬度 | number | |
| longitude | 经度 | number | |
| manufacturer | 厂商 | string | |
| siteModel | 型号 | string | |
| siteModelId | 站点型号id | integer | |
| siteSn | 编号 | string | |
| stationType | 站点类型 | string | |
| type | 类别 | string | |
| typeId | 类别id | integer | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"count": 0,
"list": [
{
"address": "",
"createdAt": "",
"customName": "",
"gcs": true,
"hangarFversion": "",
"height": 0,
"id": 0,
"imageTransmission": true,
"isHaveUrgentPlan": true,
"isOnline": 0,
"isUpdate": true,
"latitude": 0,
"longitude": 0,
"manufacturer": "",
"siteModel": "",
"siteModelId": 0,
"siteSn": "",
"stationType": "",
"type": "",
"typeId": 0
}
]
},
"msg": "",
"success": true
}2.2 获取无人机列表
接口地址
GET /device/v1/flightPlatform/list
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 |
|---|---|---|---|---|
| address | 设备所在地 | query | false | string |
| customName | 设备昵称 | query | false | string |
| isOrderByDefault | query | false | boolean | |
| pageNo | query | false | integer(int32) | |
| pageSize | query | false | integer(int32) | |
| typeId | 无人机类型id | query | false | integer(int64) |
| uavModelId | 无人机型号id | query | false | integer(int64) |
| uavSn | 设备编号 | query | false | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«BaseListVO«FlightPlatformListVO»» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | BaseListVO«FlightPlatformListVO» | BaseListVO«FlightPlatformListVO» | |
| count | integer(int64) | ||
| list | array | FlightPlatformListVO | |
| address | 位置 | string | |
| autopliotSn | 飞控编号 | string | |
| channel | 通道 | string | |
| createdAt | 创建时间 | string | |
| customName | 自定义名称 | string | |
| id | id | integer | |
| isUpdate | 是否可更新 | boolean | |
| manufacturer | 厂商 | string | |
| productId | 无人机对应更新飞控程序唯一标识 | integer | |
| registrationNo | 无人机登记号 | string | |
| totalCount | 飞行总架次 | integer | |
| type | 类别 | string | |
| typeId | 类别id | integer | |
| uavFversion | 无人机当前飞控版本 | string | |
| uavModel | 型号 | string | |
| uavModelId | 型号id | integer | |
| uavSn | 编号 | string | |
| uavState | 无人机状态 0离线 1在线 2更新中 | integer | |
| updatedAt | 更新时间 | string | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"count": 0,
"list": [
{
"address": "",
"autopliotSn": "",
"channel": "",
"createdAt": "",
"customName": "",
"id": 0,
"isUpdate": true,
"manufacturer": "",
"productId": 0,
"registrationNo": "",
"totalCount": 0,
"type": "",
"typeId": 0,
"uavFversion": "",
"uavModel": "",
"uavModelId": 0,
"uavSn": "",
"uavState": 0,
"updatedAt": ""
}
]
},
"msg": "",
"success": true
}2.3 获取机库拉流地址
接口地址
GET /flightmonitor/v1/video/operation/getSitePullUrl
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| siteSn | 机库编号 | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«VideoSitePullUrlVO» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | VideoSitePullUrlVO | VideoSitePullUrlVO | |
| insidePullUrls | 机库内拉流地址 | VideoCommonUrlVO | VideoCommonUrlVO |
| flvUrl | flvUrl拉流地址 | string | |
| mp4Url | mp4Url拉流地址 | string | |
| rtmpUrl | rtmpUrl拉流地址 | string | |
| rtspUrl | rtspUrl拉流地址 | string | |
| webrtcUrl | webrtc拉流地址 | string | |
| insideTwoPullUrls | 机库内拉流地址2 | VideoCommonUrlVO | VideoCommonUrlVO |
| flvUrl | flvUrl拉流地址 | string | |
| mp4Url | mp4Url拉流地址 | string | |
| rtmpUrl | rtmpUrl拉流地址 | string | |
| rtspUrl | rtspUrl拉流地址 | string | |
| webrtcUrl | webrtc拉流地址 | string | |
| outsidePullUrls | 机库外拉流地址 | VideoCommonUrlVO | VideoCommonUrlVO |
| flvUrl | flvUrl拉流地址 | string | |
| mp4Url | mp4Url拉流地址 | string | |
| rtmpUrl | rtmpUrl拉流地址 | string | |
| rtspUrl | rtspUrl拉流地址 | string | |
| webrtcUrl | webrtc拉流地址 | string | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"insidePullUrls": {
"webrtcUrl": "webrtc://127.0.0.1:8001/in/test",
"rtspUrl": "rtsp://127.0.0.1:8001/in/test",
"rtmpUrl": "rtmp://127.0.0.1:8001/in/test",
"mp4Url": "http://127.0.0.1:8001/in/test.live.mp4",
"flvUrl": "http://127.0.0.1:8001/in/test.live.flv"
},
"insideTwoPullUrls": {
"webrtcUrl": "webrtc://127.0.0.1:8001/in2/test",
"rtspUrl": "rtsp://127.0.0.1:8001/in2/test",
"rtmpUrl": "rtmp://127.0.0.1:8001/in2/test",
"mp4Url": "http://127.0.0.1:8001/in2/test.live.mp4",
"flvUrl": "http://127.0.0.1:8001/in/test.live.flv"
},
"outsidePullUrls": {
"webrtcUrl": "webrtc://127.0.0.1:8001/out/test",
"rtspUrl": "rtsp://127.0.0.1:8001/out/test",
"mp4Url": "http://127.0.0.1:8001/out/test.live.mp4"
}
}
}2.4 获取无人机拉流地址
接口地址
GET /flightmonitor/v1/video/operation/getUavPullUrl
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 |
|---|---|---|---|---|
| autopliotSn | 飞控编号 | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«VideoCommonUrlVO» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | VideoCommonUrlVO | VideoCommonUrlVO | |
| flvUrl | flvUrl拉流地址 | string | |
| mp4Url | mp4Url拉流地址 | string | |
| rtmpUrl | rtmpUrl拉流地址 | string | |
| rtspUrl | rtspUrl拉流地址 | string | |
| webrtcUrl | webrtc拉流地址 | string | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"webrtcUrl": "webrtc://127.0.0.1:8001/1085001/test",
"rtspUrl": "rtsp://127.0.0.1:8001/1085001/test",
"rtmpUrl": "rtmp://127.0.0.1:8001/1085001/test",
"mp4Url": "http://127.0.0.1:8001/1085001/test.live.mp4",
"flvUrl": "http://127.0.0.1:8001/1085001/test.live.flv"
},
"msg": "",
"success": true
}2.5 查询设备关联型号列表
接口地址
GET /device/v1/deviceModelRealDict/getModelsByParent
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 |
|---|---|---|---|---|
| parentModelIds | 父模型id列表 | query | true | string |
| realType | 关联类型(0:站点关联无人机,1:无人机关联载荷, 2:载荷可搭配载荷) | query | true | integer(int32) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«List«子模型»» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | array | 子模型 | |
| childModelId | 子模型id(传参时用这个即可) | integer(int64) | |
| childModelName | 子模型名称(用于前端显示) | string | |
| subType | 无人机子类型 | string | |
| typeId | 无人机类型(1固定翼 2多旋翼 3复合翼 7激光雷达 8光电吊舱 9相机 10机库 11指控车 12地面基站 13网联终端 14中继站点) | integer(int64) | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": [
{
"childModelId": 0,
"childModelName": "",
"subType": "",
"typeId": 0
}
],
"msg": "",
"success": true
}2.6 获取站点详情
接口地址
GET /device/v1/site/info
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 |
|---|---|---|---|---|
| id | 站点id | query | true | integer(int64) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«BaseInfoVO«SiteInfoVO»» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | BaseInfoVO«SiteInfoVO» | BaseInfoVO«SiteInfoVO» | |
| info | SiteInfoVO | SiteInfoVO | |
| address | 位置 | string | |
| alternateHeight | 备降点高度 | number | |
| alternateLat | 备降点纬度 | number | |
| alternateLon | 备降点经度 | number | |
| beforeHeight | 795点高度 | number | |
| beforeLatitude | 795点纬度 | number | |
| beforeLongitude | 795点经度 | number | |
| customName | 自定义名称 | string | |
| entranceDirection | 入场方向 | number | |
| height | 高度 | number | |
| id | id | integer | |
| inMonitorUrl | 内监控视频地址 | string | |
| inMonitorUrl2 | 内监控视频地址2 | string | |
| isQuickLand | 是否快速降落 1是 0否 | boolean | |
| isRightHover | 是否右盘旋 1是 0否 | boolean | |
| latitude | 纬度 | number | |
| longitude | 经度 | number | |
| manufacturer | 厂商 | string | |
| noticeMail | string | ||
| outMonitorUrl | 外监控视频地址 | string | |
| siteModel | 型号 | string | |
| siteModelId | 站点型号id | integer | |
| siteSn | 编号 | string | |
| type | 类别 | string | |
| typeId | 类别id | integer | |
| updateOnePoints | 需要修改的1号航点信息列表 | array | UpdateOnePointForm |
| alt | 高度,单位m | number | |
| lat | 纬度 | number | |
| lon | 经度 | number | |
| updateWayPoints | 需要修改的航点信息列表 | array | UpdateWayPointForm |
| actHover | 悬停 | boolean | |
| actLight | 航向保持 | boolean | |
| actOrbitAbove | 超高盘旋 | boolean | |
| actOrbitBelow | 超低盘旋 | boolean | |
| actPreture | 预转弯 | boolean | |
| actSlope | 坡度 | boolean | |
| alt | 高度,单位m | number | |
| index | 当前航路点 | integer | |
| lat | 纬度 | number | |
| lon | 经度 | number | |
| nextIndex | 指向的下一航路点 | integer | |
| orbitRadius | 盘旋半径,单位m,为0不盘旋 | integer | |
| orbitRight | 是否为右盘旋方向,1为顺时针,0为反时针 | boolean | |
| orbitTime | 盘旋时间,单位s。如果为零则无限时盘旋 | integer | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"info": {
"address": "",
"alternateHeight": 0,
"alternateLat": 0,
"alternateLon": 0,
"beforeHeight": 0,
"beforeLatitude": 0,
"beforeLongitude": 0,
"customName": "",
"entranceDirection": 0,
"height": 0,
"id": 0,
"inMonitorUrl": "",
"inMonitorUrl2": "",
"isQuickLand": true,
"isRightHover": true,
"latitude": 0,
"longitude": 0,
"manufacturer": "",
"noticeMail": "",
"outMonitorUrl": "",
"siteModel": "",
"siteModelId": 0,
"siteSn": "",
"type": "",
"typeId": 0,
"updateOnePoints": [
{
"alt": 0,
"lat": 0,
"lon": 0
}
],
"updateWayPoints": [
{
"actHover": true,
"actLight": true,
"actOrbitAbove": true,
"actOrbitBelow": true,
"actPreture": true,
"actSlope": true,
"alt": 0,
"index": 0,
"lat": 0,
"lon": 0,
"nextIndex": 0,
"orbitRadius": 0,
"orbitRight": true,
"orbitTime": 0
}
]
}
},
"msg": "",
"success": true
}2.7 根据飞控编号获取飞机详情
接口地址:/device/v1/flightPlatform/getInfoByPilotId
请求方式:GET
请求数据类型:application/x-www-form-urlencoded
响应数据类型:*/*
接口描述:
请求参数:
| 参数名称 | 参数说明 | 请求类型 | 是否必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| pilotId | pilotId | query | true | string |
响应状态:
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«FlightPlatformInfoVO» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数:
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | FlightPlatformInfoVO | FlightPlatformInfoVO | |
| address | 位置 | string | |
| autopliotSn | 飞控编号 | string | |
| channel | 通道 | string | |
| customName | 自定义名称 | string | |
| id | id | integer(int64) | |
| isMulti | 是否是多旋翼设备 | boolean | |
| manufacturer | 厂商 | string | |
| registrationNo | 无人机登记号 | string | |
| type | 类别 | string | |
| typeId | 类别id | integer(int64) | |
| uavModel | 型号 | string | |
| uavModelId | 型号id | integer(int64) | |
| uavSn | 编号 | string | |
| msg | string | ||
| success | boolean |
响应示例:
javascript
{
"code": 0,
"data": {
"address": "",
"autopliotSn": "",
"channel": "",
"customName": "",
"id": 0,
"isMulti": true,
"manufacturer": "",
"registrationNo": "",
"type": "",
"typeId": 0,
"uavModel": "",
"uavModelId": 0,
"uavSn": ""
},
"msg": "",
"success": true
}3 航线任务管理
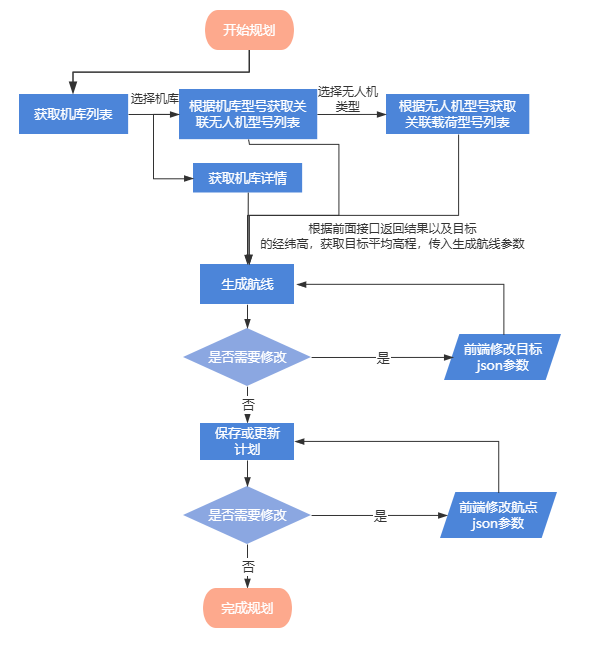
规划任务步骤图如下图所示:

3.1 生成航线
接口地址
POST /missionCenter/v1/route/generatingRoute
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | GeneratingRouteForm | GeneratingRouteForm |
| categoryType | 分类类型 | true | integer(int32) | ||
| generationTargetForms | 目标对象列表 | true | array | GenerationTargetForm | |
| adaptiveAltitude | 是否仿地,默认false | false | boolean | ||
| adaptiveLine | 是否仿线,默认false | false | boolean | ||
| ascendMax | 最大爬升角 | false | number | ||
| courseOverlapRatio | 航向重叠率 | false | number | ||
| datumElevation | 基准面高程 | false | number | ||
| descendMax | 最大下滑角 | false | number | ||
| distanceToBuffer | 缓冲区距离 | false | number | ||
| frameworkEnable | 是否构架 | false | boolean | ||
| frameworkEndsCount | 目标构架起始倍数 | false | integer | ||
| frameworkPairCount | 目标构架对数 | false | integer | ||
| frameworkPrior | 是否构架优先 | false | boolean | ||
| frameworkRaisedHeight | 目标构架高差 | false | number | ||
| frontalBearing | 主航向角 | false | number | ||
| groundSampleDistance | 地面分辨率,取值范围0-1 | false | number | ||
| height | 目标地理坐标-高度 | true | array | number | |
| isLidarEight | 是否开启首尾雷达八字航线 | false | boolean | ||
| isLidarHighPrecision | 是否开启雷达高精度航姿 | false | boolean | ||
| isMapping | 是否开启拼图 | false | boolean | ||
| isRight | 是否偏右(偏左-false/偏右-true)默认true | false | boolean | ||
| lateralOverlap | 旁向重叠度,取值范围0-1 | false | number | ||
| latitude | 目标地理坐标-纬度 | true | array | number | |
| longitude | 目标地理坐标-经度 | true | array | number | |
| minTurnAngle | 预转弯阈值 | false | number | ||
| orbitRadius | 盘旋半径 | false | number | ||
| orbitTime | 盘旋时间 | false | number | ||
| planMode | 规划方式,0:常规飞行,1:仿地飞行,2仿线飞行 | false | integer | ||
| relativeHeight | 相对航高 | false | number | ||
| relativeHeightMin | 最小相对航高 | false | number | ||
| routeSpacing | 航线间距 | false | number | ||
| sensorParams | 传感器参数 | false | SensorForm | SensorForm | |
| climbSpeedMax | 最大爬升速度 | false | number | ||
| declineSpeedMax | 最大下降速度 | false | number | ||
| flySpeed | 飞行速度 | false | number | ||
| lidarType | 雷达类型 | false | integer | ||
| ppr | 发射频率 | false | integer | ||
| pprMode | 扫描频率工作模式 | false | integer | ||
| radarInfo | 雷达参数 | false | RadarInfoForm | RadarInfoForm | |
| lspeed | 线扫速度 | false | number | ||
| pointRange | 点线距 | false | number | ||
| pointTense | 点云密度 | false | number | ||
| routeWidthLidar | 扫描带宽 | false | number | ||
| reflect | 地面反射率 | false | number | ||
| scanDeg | 雷达视场角 | false | number | ||
| startDeg | 起始角度 | false | number | ||
| vehicleSpeed | 速度 | false | number | ||
| yueshu | 仿地飞行约束 | false | integer | ||
| stripeCount | 航线条数 | false | integer | ||
| targetName | 目标名称 | false | string | ||
| targetType | 目标类型 Polygon多边形 LineString带状 Point点 | true | string | ||
| turningRight | 目标转向符,默认true | false | boolean | ||
| viewAngle | 视场角 | false | number | ||
| waypointAction | 航点动作-多旋翼-点目标时用到,无-0,定点拍照-1,环绕拍照-3~100 | false | integer | ||
| index | 切换进入点的索引号,需切换进入点时才需要传 | false | integer(int32) | ||
| landSiteSn | 降落站点编号 | true | string | ||
| loadModelId | 载荷型号id | true | integer(int64) | ||
| planHomeParamForm | 计划home点属性 | true | 计划home点属性 | 计划home点属性 | |
| auxiliaryRoute | 辅助航线,仅监控版(载荷选吊舱)显示,单选,包括(简单爬高-Simple、盘旋爬高-Hover、四边航线-Rect) | false | string | ||
| height | 目标地理坐标-高度 | true | number | ||
| latitude | 目标地理坐标-纬度 | true | number | ||
| longitude | 目标地理坐标-经度 | true | number | ||
| orbitRadius | 盘旋半径 | true | number | ||
| planName | 计划名称 | true | string | ||
| startSiteSn | 起飞站点编号 | true | string | ||
| uavModelId | 无人机型号id | true | integer(int64) |
请求示例
json
{
"categoryType": "3",
"startSiteSn": "test123",
"landSiteSn": "test123",
"uavModelId": "1719899695026552833",
"loadModelId": "1719899839822315522",
"generationTargetForms": [
{
"adaptiveAltitude": false,
"frontalBearing": 0,
"lateralLeaveOffset": 0,
"frameworkPairCount": 0,
"selecti": -1,
"type": "ENT_Target",
"ascendMax": 0,
"stripeCount": 2,
"frameworkTrip": 0,
"enable": 1,
"isMapping": false,
"relHeightMin": 50,
"frontalLeaveOffset": 0,
"relativeHeightMin": 50,
"longitude": [
121.33366903001419, 121.32871056852971, 121.33137100367436,
121.32887883125498, 121.32965442668845
],
"height": [5, 5, 10, 0, 6],
"frameworkRaisedHeight": 0,
"isTurningRight": 1,
"visible": 1,
"frameworkEndsCount": 0,
"descendMax": 0,
"groundSampleDistance": 0.03,
"lateralOverlap": 0.6,
"photoNumber": -1,
"planMode": 0,
"relativeHeight": 200,
"turningRight": true,
"parentGuid": "c821969a-dd4b-4f41-b75b-4a12b386b097",
"name": "线目标1",
"lateralEntryOffset": 32,
"guid": "0bf3c5b9-fb76-4488-85b1-587b509fd9a2",
"frontalEntryOffset": 0,
"style": "",
"viewAngle": 63.7,
"isGroup": 0,
"courseOverlapRatio": 0,
"routeSpacing": 200,
"targetName": "线目标1",
"currentEntryPoint": 5,
"minTurnAngle": 0,
"latitude": [
30.24111654753199, 30.234769057958477, 30.229813119458186,
30.223700875846056, 30.223171564487032
],
"orbitRadius": 0,
"distanceToBuffer": 200,
"frameworkEnable": false,
"frameworkPrior": false,
"adaptiveLine": 0,
"posture": [0, 0, 0],
"targetType": "LineString",
"isLidarHighPrecision": false,
"datumElevation": 5.88,
"isLidarEight": false,
"isRight": true,
"comment": "",
"orbitTime": 30,
"id": "0bf3c5b9-fb76-4488-85b1-587b509fd9a2",
"isEdit": false
}
],
"planHomeParamForm": {
"auxiliaryRoute": "Hover",
"height": 212,
"orbitRadius": 150,
"latitude": 30.23,
"longitude": 121.321
},
"planName": "test-1011"
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«GeneratingRouteVO» |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | GeneratingRouteVO | GeneratingRouteVO | |
| missionPlanParamVO | 计划任务参数 | object | |
| planHomeParamVO | 计划home点属性 | object | |
| planJsonUrl | 计划的url | string | |
| routeJson | 计划的航线/航点json | string | |
| switchEntryPointVO | 切换航线进入点所需参数 | object | |
| targetJson | 目标json列表 | array | string |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"missionPlanParamVO": {
"minAltitude": 705.65,//最小高度
"maxAltitude": 715.65,//最大高度
"routeCount": 8,//航点总数
"planLength": 841.136529807446,//任务总长度,单位米
"planArea": 32180.6447110569,//任务总面积,单位平方米
},
"planHomeParamVO": {
},
"planJsonUrl": "",
"routeJson": "",
"switchEntryPointVO": {
"origination": "",//进入点起点
"destination": "",//进入点终点
"orbitRadius": 150.0//盘旋半径
},
"targetJson": [
]
},
"msg": "",
"success": true
}routeJson航线参数说明
json
{
"type": "FeatureCollection",
"features": [
{
"type": "Feature",
"properties": {
"fid": 0,
"nextFid": 1,
"comment": "",
"enable": 1,
"guid": "8bd0a4f45-b3bde5d1870b", // 航点 uid
"name": "",
"posture": [0, 0, 0],
"absSpeed": -1,
"index": 0,
"motionType": 129,
"nextIndex": 1, // 下一航点号
"orbitRadius": 154.983966584328, //盘旋半径
"orbitTime": 0, // 盘旋时间
"parentGuid": "d904fbb1-fef5-45dc-99ab-27fe84063862",
"prevIndex": -1, // 前一航点号
"selecti": -1,
"style": "",
"type": "ENT_Waypoint",
"visible": 1,
"orbit": true, // 是否盘旋
"orbitRight": false, // 是否右盘旋 true:右盘旋;false:左盘旋
"above": false, // 是否过高
"below": false, // 是否过低
"hovering": false, // 是否悬停
"oblique": false, // 是否坡度
"preTurn": true, // 是否预转弯
"orientation": 3
},
"geometry": {
"type": "Point",
"coordinates": [
// 航点坐标经纬高
104.45799002000001, 31.631563457642066, 844.88
]
}
}
]
}3.2 新增/更新计划
接口地址
POST /missionCenter/v1/plan/saveOrUpdatePlan
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | 创建or更新计划 | 创建or更新计划 |
| categoryId | 类别id计划类型id(1正射、2倾斜、3凝视) | true | integer(int64) | ||
| executor | 执行者 | false | integer(int64) | ||
| landSiteSn | 降落站点编号 | true | string | ||
| loadModelId | 载荷型号id | true | integer(int64) | ||
| missionPlanParamVO | 航线基本信息(航线长度、测区面积等数据) | true | object | ||
| photoMode | 拍照模式 2:定距,4:连续定距,枚举由PC协议定 | false | integer(int32) | ||
| planHomeParamForm | 计划home点属性 | true | 计划home点属性 | 计划home点属性 | |
| auxiliaryRoute | 辅助航线,仅监控版(载荷选吊舱)显示,单选,包括(简单爬高-Simple、盘旋爬高-Hover、四边航线-Rect) | false | string | ||
| height | 目标地理坐标-高度 | true | number | ||
| latitude | 目标地理坐标-纬度 | true | number | ||
| longitude | 目标地理坐标-经度 | true | number | ||
| orbitRadius | 盘旋半径 | false | number | ||
| planJsonUrl | 计划json的存储路径 | false | string | ||
| planName | 计划名称 | true | string | ||
| planNo | 计划编号 | false | string | ||
| routeJson | 航点信息 | true | string | ||
| specialTaskType | 特殊任务类型 默认0 常规任务 1 山火点任务 2 应急任务 | false | integer(int32) | ||
| startSiteSn | 起飞站点编号 | true | string | ||
| stationList | 中继站点 | false | array | string | |
| subLoadModelIds | 副载荷型号id | false | array | integer | |
| switchEntryPointVO | 切换进入点信息 | true | object | ||
| targetJson | 目标列表 | true | array | string | |
| targetNameList | 目标名称列表(需要和targetJson数据顺序保持一致) | false | array | string | |
| uavModelId | 无人机型号id | true | integer(int64) |
请求示例
json
{
"planHomeParamForm": {
"auxiliaryRoute": "Hover",
"height": 212,
"orbitRadius": 150,
"latitude": 30.23,
"longitude": 121.321
},
"startSiteSn": "test123",
"landSiteSn": "test123",
"uavModelId": "1719899695026552833",
"loadModelId": "1719899839822315522",
"subLoadModelId": null,
"categoryId": "3",
"routeJson": "",
"targetJson": [
"{\"features\":[{\"type\":\"Feature\",\"properties\":{\"adaptiveAltitude\":false,\"frontalBearing\":0.0,\"lateralLeaveOffset\":0,\"frameworkPairCount\":0,\"selecti\":-1,\"type\":\"ENT_Target\",\",\"name\":\"线目标1\",\"type\":\"FTT_NewTarget\"}}],\"type\":\"FeatureCollection\"}"
],
"missionPlanParamVO": {
"minAltitude": 205.88,
"maxAltitude": 205.88,
"planTime": "00:11:33",
"routeCount": 20,
"planLength": 13480.909551638422,
"planArea": 916916.3537961891
},
"planJsonUrl": "http://121.36.60.53:9000/jocloud-hangar/%2F1728616401655st_temp5377987383335628645.json",
"planName": "test-1011",
"switchEntryPointVO": {
"origination": "{ \"type\": \"FeatureCollection\", \"features\": [{ \"type\": \"Feature\", \"properties\": { \"comment\": \"test123\", \"enable\": 1, \"guid\": \"78cf2ed6-6d25-49e3-b5a0-isible\": 1 }, \"geometry\": { \"type\": \"Point\", \"coordinates\": [ 121.321, 30.23, 212.0 ] } } ] }",
"destination": "{ \"type\": \"FeatureCollection\", \"features\": [{ \"type\": \"Feature\", \"properties\": { \"comment\", \"visible\": 1 }, \"geometry\": { \"type\": \"Point\", \"coordinates\": [ 121.321, 30.23, 212.0 ] } } ] }",
"orbitRadius": 150
},
"planNo": "PLAN202410110950078683"
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": "PLAN202551515151",
"msg": "",
"success": true
}3.3 获取计划列表
接口地址
GET /missionCenter/v1/plan/planList
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| categoryId | 计划类型id(1正射、2倾斜、3凝视) | query | false | integer(int64) | |
| categoryIdList | 计划类型id(1正射、2倾斜、3凝视) | query | false | array | integer |
| isOrderByDefault | query | false | boolean | ||
| pageNo | query | false | integer(int32) | ||
| pageSize | query | false | integer(int32) | ||
| planName | 计划名称 | query | false | string | |
| planTargetIds | 计划目标id列表 | query | false | array | integer |
| siteSn | 机库编号 | query | false | string | |
| specialTaskTypeList | 特殊任务类型 默认0:常规任务;1:山火点任务;2:应急任务 | query | false | array | integer |
| uavType | 计划设备类型(1固定翼、2多旋翼、3复合翼) | query | false | integer(int64) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«BaseListVO«计划基础信息»» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | BaseListVO«计划基础信息» | BaseListVO«计划基础信息» | |
| count | integer(int64) | ||
| list | array | 计划基础信息 | |
| categoryId | 计划类型id(1正射、2倾斜、3凝视) | integer | |
| creator | 创建人 | integer | |
| executeAt | 执行时间 | string | |
| executeCycleNum | 执行周期数值(周1-7;月1-31) | integer | |
| executeCycleTime | 执行周期时间 HH:mm:ss | string | |
| executeCycleType | 执行周期类型 1周 2月 | integer | |
| executeStartTime | 定期任务从该时间之后开始执行 | string | |
| executeType | 计划策略类型 | integer | |
| executor | 执行者 | integer | |
| isOnline | 机库在线状态(0-不在线、1-在线) | integer | |
| isOpenExecute | 是否开启定时/定期 | boolean | |
| landErrorState | 降落机库状态normalRun正常运行, warning警告, seriousWarning严重警告,fatalError致命错误 | string | |
| landManufacturer | 降落的机库厂商:DJI判断使用 | string | |
| landOnline | 降落机库通信状态 0-离线 1-在线 | integer | |
| landSiteName | 降落机库名称 | string | |
| landSiteSn | 降落机库编号 | string | |
| loadType | 载荷类型 | string | |
| planExecuteStepStatus | 飞前流程状态:-1:检查失败 | string | |
| planName | 计划名称 | string | |
| planNo | 计划编号 | string | |
| planState | 计划列表显示状态,0:待执行;1:飞前准备进行中;2:飞前准备完成等待起飞;3:执行中;4:执行完成;5:自检失败;6:数据回传中;7:数据回传成功;8:数据回传失败; | integer | |
| planStatus | 计划状态 0-待执行 1-飞前准备进行中 2-飞前准备完成等待起飞 3-执行中 | integer | |
| planType | 任务类型(1-云平台机库任务、2-云平台非机库任务、3-大疆任务、4-地面站任务) | integer | |
| siteName | 机库名称 | string | |
| siteSn | 机库编号 | string | |
| specialTaskType | 特殊任务类型,默认0常规任务;1山火点任务;2应急任务 | string | |
| startErrorState | 起飞机库状态normalRun正常运行, warning警告, seriousWarning严重警告,fatalError致命错误 | string | |
| startManufacturer | 起飞的机库厂商:DJI判断使用 | string | |
| startOnline | 起飞机库通信状态 0-离线 1-在线 | integer | |
| startSiteName | 起飞机库名称 | string | |
| startSiteSn | 起飞机库编号 | string | |
| uavModelName | 无人机型号 | string | |
| uavType | 计划设备类型(1固定翼、2多旋翼、3复合翼) | integer | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"count": 0,
"list": [
{
"categoryId": 0,
"creator": 0,
"executeAt": "",
"executeCycleNum": 0,
"executeCycleTime": "",
"executeCycleType": 0,
"executeStartTime": "",
"executeType": 0,
"executor": 0,
"isOpenExecute": true,
"landSiteName": "",
"landSiteSn": "",
"loadType": "",
"planExecuteStepStatus": "",
"planName": "",
"planNo": "",
"planStatus": 0,
"planType": 0,
"startSiteName": "",
"startSiteSn": "",
"uavModelName": "",
"uavType": 0
}
]
},
"msg": "",
"success": true
}3.4 计划详情
接口地址
GET /missionCenter/v1/plan/planInfo
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 |
|---|---|---|---|---|
| planNo | 计划编号 | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«PlanParamInfoVO» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | PlanParamInfoVO | PlanParamInfoVO | |
| autopliotSn | 飞控编号 | string | |
| categoryId | 类别id | integer(int64) | |
| createUserName | 创建人 | string | |
| createdAt | 创建时间 | string(date-time) | |
| enterpriseType | 企业类型 暂1电网 0非电网 | integer(int32) | |
| executeType | 执行类型(0:即时任务,1:定时任务;2:定期任务) | integer(int32) | |
| executor | 执行者 | integer(int64) | |
| executorNickName | 执行者昵称 | string | |
| isAutoUrgent | 是否自动应急任务 ture/false | boolean | |
| kmlIdList | 计划关联的kml杆塔线路 id,前期只有一个 | array | string |
| landErrorState | 降落机库状态normalRun正常运行, warning警告, seriousWarning严重警告,fatalError致命错误 | string | |
| landOnline | 降落机库通信状态 0-离线 1-在线 | integer(int32) | |
| landSiteChange | 应急降落机库信息 | object | |
| landSiteName | 降落机库名称 | string | |
| landSiteSn | 降落站点编号 | string | |
| loadModel | 载荷型号 | string | |
| loadModelId | 载荷型号id | integer(int64) | |
| loadSubType | 主载荷真实的类型名称,model_dict中的subType属性 | string | |
| loadType | 载荷型号(7激光雷达 8光电吊舱 9相机) | integer(int64) | |
| missionPlanParamVO | 计划任务参数 | object | |
| photoMode | 相机拍照模式 | integer(int32) | |
| planHomeParamVO | 计划home点属性 | PlanHomeParamVO | PlanHomeParamVO |
| auxiliaryRoute | 辅助航线,仅监控版(载荷选吊舱)显示,单选,包括(简单爬高、盘旋爬高、四边航线) | string | |
| height | 目标地理坐标-高度 | number | |
| latitude | 目标地理坐标-纬度 | number | |
| longitude | 目标地理坐标-经度 | number | |
| orbitRadius | 盘旋半径 | number | |
| planJsonUrl | 计划的url | string | |
| planName | 计划名称 | string | |
| planNo | 计划编号 | string | |
| planRefKmlUrl | 计划关联kml地址 | string | |
| planState | 计划列表显示状态,0:待执行;1:飞前准备进行中;2:飞前准备完成等待起飞;3:执行中;4:执行完成;5:自检失败;6:数据回传中;7:数据回传成功;8:数据回传失败; | integer(int32) | |
| planStatus | 计划状态 | integer(int32) | |
| planType | 任务类型(1-云平台机库任务、2-云平台非机库任务、3-大疆任务、4-地面站任务) | integer(int32) | |
| recordNo | 飞行架次编号(未完成的架次编号) | string | |
| routeJson | 航点信息 | string | |
| sitGeoJson | 站点地理要素 | object | |
| siteAlternateVO | 站点位置信息 | 被降点信息 | 被降点信息 |
| alternateHeight | 备降点高度 | number | |
| alternateLat | 备降点纬度 | number | |
| alternateLon | 备降点经度 | number | |
| beforeHeight | 795点高度 | number | |
| beforeLatitude | 795点纬度 | number | |
| beforeLongitude | 795点经度 | number | |
| entranceDirection | 入场方向 | number | |
| isRightHover | 是否右盘旋 1是 0否 | boolean | |
| specialTaskType | 默认0 常规任务 1 山火点任务 | integer(int32) | |
| startErrorState | 起飞机库状态normalRun正常运行, warning警告, seriousWarning严重警告,fatalError致命错误 | string | |
| startOnline | 起飞机库通信状态 0-离线 1-在线 | integer(int32) | |
| startSiteName | 起飞机库名称 | string | |
| startSiteSn | 起飞站点编号 | string | |
| stationList | 计划关联的基站 | array | PlanStationVO |
| stationSn | 计划关联的基站编号 | string | |
| subLoadInfoVOs | 副载荷信息列表 | array | SubLoadInfoVO |
| subLoadModel | 副载荷型号 | string | |
| subLoadModelId | 副载荷型号id | integer | |
| subLoadType | 副载荷型号类型:载荷型号(7激光雷达 8光电吊舱 9相机) | integer | |
| switchEntryPointVO | 切换进入点信息 | object | |
| targetJson | 目标列表 | array | string |
| uavLocationInfo | 无人机位置信息 | 位置基本信息 | 位置基本信息 |
| address | 位置 | string | |
| deviceType | device类型 | string | |
| height | 高度 | number | |
| isOnline | 是否在线 1是 0否 | boolean | |
| latitude | 纬度 | number | |
| longitude | 经度 | number | |
| sn | 无人机/站点-编号 | string | |
| uavModel | 无人机型号 | string | |
| uavModelId | 无人机型号id | integer(int64) | |
| uavType | 计划设备类型(1固定翼、2多旋翼、3复合翼) | integer(int64) | |
| flightId | 第三方计划编号 | string | |
| updatedAt | 更新时间 | string(date-time) | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"autopliotSn": "",
"categoryId": 0,
"createUserName": "",
"createdAt": "",
"enterpriseType": 0,
"executeType": 0,
"executor": 0,
"executorNickName": "",
"isAutoUrgent": true,
"kmlIdList": [],
"landErrorState": "",
"landOnline": 0,
"landSiteChange": {},
"landSiteName": "",
"landSiteSn": "",
"loadModel": "",
"loadModelId": 0,
"loadSubType": "",
"loadType": 0,
"missionPlanParamVO": {},
"photoMode": 0,
"planHomeParamVO": {
"auxiliaryRoute": "",
"height": 0,
"latitude": 0,
"longitude": 0,
"orbitRadius": 0
},
"planJsonUrl": "",
"planName": "",
"planNo": "",
"planRefKmlUrl": "",
"planState": 0,
"planStatus": 0,
"planType": 0,
"recordNo": "",
"routeJson": "",
"sitGeoJson": {},
"siteAlternateVO": {
"alternateHeight": 0,
"alternateLat": 0,
"alternateLon": 0,
"beforeHeight": 0,
"beforeLatitude": 0,
"beforeLongitude": 0,
"entranceDirection": 0,
"isRightHover": true
},
"specialTaskType": 0,
"startErrorState": "",
"startOnline": 0,
"startSiteName": "",
"startSiteSn": "",
"stationList": [
{
"stationSn": ""
}
],
"subLoadInfoVOs": [
{
"subLoadModel": "",
"subLoadModelId": 0,
"subLoadType": 0
}
],
"switchEntryPointVO": {},
"targetJson": [],
"uavLocationInfo": {
"address": "",
"deviceType": "",
"height": 0,
"isOnline": true,
"latitude": 0,
"longitude": 0,
"sn": ""
},
"uavModel": "",
"uavModelId": 0,
"uavType": 0,
"updatedAt": ""
},
"msg": "",
"success": true
}3.5 获取目标的平均高程
接口地址
POST /missionCenter/v1/planTarget/getMeanElevation
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| meanElevationForm | meanElevationForm | body | true | 获取基准面高程参数 | 获取基准面高程参数 |
| distance | 缓冲区距离 | true | number(double) | ||
| geoJsonContent | 经纬度 | true | object |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}3.6 获取架次列表
接口地址
GET /missionCenter/v1/record/getRecordSimpleDataListByPlanNo
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 |
|---|---|---|---|---|
| planNo | 计划编号 | query | true | string |
| isOrderByDefault | query | false | boolean | |
| pageNo | query | false | integer(int32) | |
| pageSize | query | false | integer(int32) | |
| queryEndAt | 查询开始时间(yyyy-MM-dd HH:mm:ss) | query | false | string |
| queryStartAt | 查询开始时间(yyyy-MM-dd HH:mm:ss) | query | false | string |
| sortByDesc | 架次顺序倒序 | query | false | boolean |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«BaseListVO«架次简单信息详情»» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | BaseListVO«架次简单信息详情» | BaseListVO«架次简单信息详情» | |
| count | integer(int64) | ||
| list | array | 架次简单信息详情 | |
| clientId | 机库编号 | string | |
| startAt | 起飞时间 | string | |
| createdAt | 创建时间 | string | |
| endAt | 结束时间 | string | |
| isExecute | 是否执行 | boolean | |
| loadList | 载荷子类型名称列表 | array | string |
| pilotId | 飞控编号 | string | |
| planNo | 计划编号 | string | |
| recordName | 架次名称 | string | |
| recordNo | 架次编号 | string | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"count": 0,
"list": [
{
"clientId": "",
"createdAt": "",
"loadList": [],
"pilotId": "",
"planNo": "",
"recordName": "",
"recordNo": ""
}
]
},
"msg": "",
"success": true
}3.7 获取架次文件
接口地址
GET /dataManagement/v1/fileOperate/getFileList
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| fileType | 文件类型:OriginalPhoto(原始照片)/SnapPhoto(截图快照)/OriginalVideo(原始视频)/RecordVideo(录像视频)/ domFile(dom文件) | query | true | string | |
| planNo | 任务编号 | query | true | string | |
| recordNo | 架次编号 | query | false | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«BaseListVO«PlanFileVO»» |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | BaseListVO«PlanFileVO» | BaseListVO«PlanFileVO» | |
| count | integer(int64) | ||
| list | array | PlanFileVO | |
| altitude | 高度 | number | |
| createdAt | 文件创建时间 | string | |
| fileName | 文件名称 | string | |
| fileType | 文件类型 | string | |
| fileUrl | 文件路径 | string | |
| id | 文件id | string | |
| latitude | 纬度 | number | |
| longitude | 经度 | number | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"count": 0,
"list": [
{
"altitude": 0,
"createdAt": "",
"fileName": "",
"fileType": "",
"fileUrl": "",
"id": "",
"latitude": 0,
"longitude": 0
}
]
},
"msg": "",
"success": true
}3.8 计算地面分辨率
接口地址
GET /missionCenter/v1/planTarget/calculateGsd
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| relativeHeight | 相对行高 | query | true | number(double) | |
| viewAngle | 视场角 | query | true | number(double) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}3.9 计算旁向间隔(也称:航带间隔或航线间距)
接口地址
GET /missionCenter/v1/planTarget/calculateWeftSpacing
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| lateralOverlapRatio | 旁向重叠率(取值范围0-1) | query | true | number(double) | |
| relativeHeight | 相对行高 | query | true | number(double) | |
| viewAngle | 视场角 | query | true | number(double) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}3.10 删除计划
接口地址
DELETE /missionCenter/v1/plan/deletePlan
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | 计划编号 | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 204 | No Content | |
| 401 | Unauthorized | |
| 403 | Forbidden |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}3.11 结束计划
接口地址
PUT /flightmonitor/v1/abnormalEnd/stop
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| baseForm | baseForm | body | true | StopTaskForm | StopTaskForm |
| planNo | 计划编号 | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}**4.**机库控制管理
4.1 飞机上下电控制
接口地址
POST /hangar/v1/hangarOperation/taskControl
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | TaskControlForm | TaskControlForm |
| clearFault | 清除错误 | false | string | ||
| fastPreCheckTakeOff | 快速预检展开 | false | string | ||
| inWaitLoadMode | 无机待降 | false | string | ||
| loadType | 载荷类型 | false | string | ||
| manualStop | 手动结束执行中任务 | false | string | ||
| power | 上电/下电 | false | string | ||
| preCheckTakeOff | 预检展开 | false | string | ||
| siteSn | 站点编号 | true | string | ||
| taskName | 任务名称 | false | string | ||
| turboPreCheckTakeOff | 极速预检展开 | false | string | ||
| unlockNoAir | 解锁无飞机模式 | false | string | ||
| uvaTakeOff | 放飞执行 | false | string |
请求示例
json
{
"clearFault": "go",
"fastPreCheckTakeOff": 1200,
"inWaitLoadMode": "go",
"loadType": "LR22S",
"manualStop": "go",
"power": "on/off",
"preCheckTakeOff": "go",
"siteSn": "",
"taskName": "",
"turboPreCheckTakeOff": 1800,
"unlockNoAir": "go",
"uvaTakeOff": "go"
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}**5.**飞行监控管理
5.1 进入飞前自检
接口地址
GET /missionCenter/v1/planExecute/flightPreparation
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | 计划编号 | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.2 退出飞前自检
接口地址
GET /missionCenter/v1/planExecute/exitFlightPreparation
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | 计划编号 | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | schema | ||
|---|---|---|---|
| code | integer (in t32) | ||
| data | |||
| msg | |||
| success |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.3 起飞(需飞前准备 ok)
接口地址
POST /hangar/v1/hangarOperation/takeOff
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | 计划编号 | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.4 快速飞行计划
接口地址
POST /flightmonitor/v1/flightPlan/quickWayPoint
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | SendQuickWayPointForm | SendQuickWayPointForm |
| clientId | 客户端(即站点编号) | true | string | ||
| isOrbit | 是否开启凝视 | true | boolean | ||
| pilotId | 飞控ID | true | string | ||
| quickWayPointForm | 快速飞行计划请求参数 | true | 快速飞行计划参数 | 快速飞行计划参数 | |
| alt | 海平面高度(m ) | true | number | ||
| direction | 方向,0为顺时针,1为反时针 | true | boolean | ||
| lat | 纬度 | true | number | ||
| lon | 经度 | true | number | ||
| orbitRadius | 盘旋半径 | true | integer | ||
| targetAlt | 观察点的地面高度(m) | false | number |
请求示例
json
{
"clientId": "",
"isOrbit": true,
"pilotId": "",
"quickWayPointForm": {
"alt": 0,
"direction": true,
"lat": 0,
"lon": 0,
"orbitRadius": 0,
"targetAlt": 0
}
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.5 跟踪航点(返航)
接口地址
POST /flightmonitor/v1/flightControl/trackOperation
接口描述
导航到计划航线对应航点继续飞行,如果 idx传 0,则为返航
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | TrackOperationForm | TrackOperationForm |
| clientId | 客户端(即站点编号) | true | string | ||
| idx | 航点序号 | true | integer(int32) | ||
| pilotId | 飞控ID | true | string |
请求示例
json
{
"clientId": "",
"idx": 0,
"pilotId": ""
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.6 立即悬停
接口地址:/flightmonitor/v1/flightControl/hoverNow
请求方式:POST
请求数据类型:application/json
响应数据类型:*/*
接口描述: 该功能适用于旋翼飞机,固定翼暂不支持
请求示例:
javascript
{
"clientId": "",
"isHover": 0,
"pilotId": ""
}请求参数:
请求参数:
| 参数名称 | 参数说明 | 请求类型 | 是否必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | HoverNowForm | HoverNowForm |
| clientId | 客户端(即站点编号) | true | string | ||
| isHover | 立即悬停:1-HoverNow, 0-HoverResume | true | integer(int32) | ||
| pilotId | 飞控ID | true | string |
响应状态:
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数:
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例:
javascript
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.7 吊舱控制
接口地址
POST /flightmonitor/v1/gimbal/gimbalControl
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | SendGimbalControlForm | SendGimbalControlForm |
| clientId | 客户端(即站点编号) | true | string | ||
| gimbalControlForm | 吊舱控制参数 | false | 吊舱控制参数 | 吊舱控制参数 | |
| cameraParam | 光学机构指令参数,state为0x80,0x87,0x88,0x89时,需要传的参数值,其它可不传,默认0 | false | number | ||
| headingAngle | 吊舱移动,航向角,默认0 | false | number | ||
| optoSensorCmd | 缩放参数为 4:放大一次,5:缩小一次,6:停止缩放; 巡线参数,34:开启巡线, 35:关闭巡线 , 默认0; 可见光设置 0X09:亮度+, 0X0A:亮度-; 红外设置 0x43:红外亮度+, 0x44:红外亮度- | false | integer | ||
| pitch | 吊舱移动,俯仰角,单位°,默认0 | false | number | ||
| seroveCmd | 伺服机构指令模式(默认为0,微调时传0xff) 0X00,// 速率模式 0X01,// 姿态模式 0X02,// 关伺服(休眠使用) 0X03,// 归零位锁定 0X04,// 零位调整 0X05,// 航向扫描 0X06,// 框架角模式 0Xff, // 微调 | false | integer | ||
| pilotId | 飞控ID | true | string |
请求示例
json
{
"clientId": "",
"gimbalControlForm": {
"cameraParam": 0,
"headingAngle": 0,
"optoSensorCmd": 0,
"pitch": 0,
"seroveCmd": 0
},
"pilotId": ""
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}吊舱光学传感器指令枚举
plain
enum GimbalOptoSensorEnum
{
MG_NO_ACTION = 0X00, // 无动作
MG_FOCUS_MANUAL_AUTO = 0X01, // 焦距自动/手动切换
MG_FOCUS_MANUAL= 0X02,// 手动焦距指令CAMARAPARA,焦距档位根据机芯而言
MG_FOCUS_LOCK = 0X03,// 视场角指令CAMARAPARA,视场角档位根据机芯而言
MG_ZOOM_WIDE_ID = 0X04,// 视场角定速率增大
MG_ZOOM_TELT_ID = 0X05, // 视场角定速率减小
MG_ZOOM_FIX_ID = 0X06, // 视场角锁定
MG_BRIGHT_MANUAL_ID = 0X07, // 手动亮度模式
MG_BRIGHT_AUTO_ID = 0X08, // 自动亮度模式
MG_BRIGHT_LIGHT_ID = 0X09, // 亮度+
MG_BRIGHT_DARK_ID = 0X0A, // 亮度-
MG_CAMERA_RECOR = 0X0B, // 录像
MG_CAMERA_ENHANC = 0X0C, // 图像增强
MG_CAMERA_STEADY = 0X0D, // 图像稳定
MG_CAMERA_SAVE = 0X0E, // 保存光学参数(焦距,亮度及视场角)
MG_CAMERA_OUT_TYPE = 0X0F, // 视频输出类型FCB-H110 X01 1080I/60 0X02 720P/60
MG_IMAGE_TRACT = 0X10, // 图像跟踪/目标跟踪
MG_IMAGE_OSD = 0X11, // OSD显示注意:触发开启或停止
MG_IMAGE_SNAPSHOT = 0X12, // 拍照一张
MG_IMAGE_VISIBLE = 0X13, // 可见光
MG_IMAGE_INFRARED = 0X14, // 红外
MG_IMAGE_Gain_ADD = 0x15, // 增益+ //MG_FOCUS_NEAR = 0X15,// 焦距+
MG_IMAGE_Gain_SUB = 0x16, // 增益- //MG_FOCUS_FAR = 0X16,// 焦距-
MG_IMAGE_OUTPUT_SWITCH = 0x17, // 输出切换(高清/标清) //MG_FOCUS_STOP = 0X17,// 焦距不变
MG_IMAGE_FOLLOW = 0x18, //随动
MG_IMAGE_BLACKWHITE = 0x19, //白热/黑热
MG_IMAGE_MERGE = 0x1a, //融合
MG_IMAGE_ROTATION = 0x1B, //融合
MG_IMAGE_AUTO_FOV = 0x1C, //区域搜索自动设置视场角
MG_IMAGE_CAR_TEST = 0x1D, //车辆检测
//红外相机控制
MG_INFRA_ZOOM_ADD = 0X1E, //(红外相机)电子放大
MG_INFRA_ENHANCE = 0x1F, //(红外相机)图像增强
MG_GEAR_RETRACT = 0X20, // 吊舱收
MG_GEAR_EXTENSION = 0X21, // 吊舱放
MG_PATH_TRACT = 0X22, // 路径跟踪启动(巡线开启,启动跟随)
MG_PATH_NO = 0X23, // 路径跟踪停止(停止巡线)
MG_GPS_TRACK_ON = 0X24, // 绕指向位置盘旋
MG_GPS_TRACK_OFF = 0X25, // 取消绕指向位置盘旋
MG_GPS_CORRECT_ON = 0X26, // 启动GPS摇杆修正
MG_GPS_CORRECT_OFF = 0X27, // 取消GPS摇杆修正
MG_RECORD_ON = 0X28, // 取消GPS摇杆修正
MG_RECORD_OFF = 0X29, // 取消GPS摇杆修正
MG_Target_AP_FOV = 0X2A, // 飞控自动调焦
MG_Target_P_ReNew = 0X2B, // 指点飞行(P_ReNew)
MG_INFRA_ENVIRONMENTAL_CORRECTION = 0x40, //背景校正
MG_INFRA_BACKGROUND_CORRECTION = 0x41, //快门校正
MG_INFRA_FILTER = 0x42, //红外滤波
MG_INFRA_LIGHT_ADD = 0x43, //红外亮度+
MG_INFRA_LIGHT_SUB = 0x44, //红外亮度-
MG_INFRA_FOV_ADD = 0x45, //视场+
MG_INFRA_FOV_SUB = 0x46, //视场-
MG_TIME_ZONE_ADJ = 0x47, //时区调整
MG_IMAGE_PUZZLE = 0x4A, //指定视场角:如果cameraParam是0,为拼图视场角;如果cameraParam不是0,为其它视场角,精度0.1,单位角度,MGXXXE-N系列吊舱的视场角范围是2.3~63.7度
MG_IMAGE_PUZZLE_ONOFF = 0x4B, //拼图开关,框架角锁定
MG_IMAGE_PUZZLE_OBLIQUE = 0x4C, //正射/倾斜
MG_IMAGE_AUTOMATIC_TARGET = 0x4D, //自动检测
MG_IMAGE_MANUAL_SELECT = 0x4E, //手动选择目标
MG_IMAGE_DETECTION_NOT_TRACK = 0x4F, //自动检测模式下,仅检测不跟踪
MG_IMAGE_TRACK_TIME = 0x50, //设置最长跟踪时间camaraPara的值为所设置的值,单位s
MG_IMAGE_REDISCOVER = 0x51, //设置目标跟丢后,重新寻找并跟踪新目标的时间camaraPara的值为所设置的值,单位s
MG_IMAGE_CONTRAST = 0x52, // 调整编码板对比度参数 camaraPara的值为所设置的值,范围0~100
MG_IMAGE_BRIGHTNESS = 0x53, // 调整编码板亮度参数 camaraPara的值为所设置的值,范围0~100
MG_IMAGE_TONE = 0x54, // 调整编码板色调参数 camaraPara的值为所设置的值,范围0~100
MG_IMAGE_SATURATION = 0x55, // 调整编码板饱和度参数 camaraPara的值为所设置的值,范围0~100
MG_IMAGE_PRESETMODE1 = 0X56, // 将编码板对比度、亮度、色调、饱和度参数设置为固定值(70 50 52 52),此值针对“薄雾”情况
MG_IMAGE_PRESETMODE2 = 0X57, // 将编码板对比度、亮度、色调、饱和度参数设置为固定值(65 35 52 52),此值针对“厚雾”情况
MG_IMAGE_HDENCODINGFORMAT = 0x58,// 0x58 可见光发送编码格式 camaraPara的值:0x00:表示无效;0x01:表示H264;0x02:表示H265;
MG_IMAGE_HDSAVEFORMAT = 0X59,// 0X59 可见光保存编码格式 camaraPara的值:0x00:表示无效;0x01:表示H264;0x02:表示H265;
MG_IMAGE_SDENCODINGFORMA = 0x5A,// 0x5A 红外编码格式 camaraPara的值:0x00:表示无效;0x01:表示H264;0x02:表示H265;
MG_IMAGE_HDTRANSMISSIONRATE = 0x5B,// 0x5B 可见光发送码率 camaraPara的值:0x00:表示无效;取值范围为1~6;
MG_IMAGE_HDSTORAGERATE = 0x5C,// 0x5C 可见光存储码率 camaraPara的值:0x00:表示无效;取值范围为1~20;
MG_IMAGE_SDCODERATE = 0X5D,// 0X5D 红外码率 camaraPara的值:0x00:表示无效;取值范围为1~4;
MG_IMAGE_GIMBALRESTART = 0x5E,// 0x5E 吊舱编码板重启
IRAUTOFOCUS,//0x60 红外相机自动聚焦
IRTELEPHOTOMODE,//0x61 红外相机长焦模式
IRSHORTFOCUSMODE,//0x62 红外相机短焦模式
LASEREQUSELFCHECK,//0x63 激光设备自检
LASERTARGETMODE,//0x64 设置首、末、多目标模式 camaraPara的值:0x00:表示无效;0x01:表示首目标模式;0x02:表示末目标模式;0x03:表示多目标模式;
LASERRANGINGMODE,//0x65 测距模式 camaraPara的值:0x00:表示无效;0x01:表示单次测距模式;0x02:表示连续测距模式;0x03:表示停止测距;
LASERRANGINGFREQ,//0x66 设置单次/连续测距频率 camaraPara的值:0x00:表示无效;取值范围(0x01~0x0A)
LASERSINGLERANGENUM,//0x67 单次测距个数 camaraPara的值:0x00:表示无效;取值范围(0x01~0x0A)
LASERMINSTROBEDIST,//0x68 设置最小选通距离 camaraPara的值:0x00:表示无效;取值范围(10~20000)米
LASERQUERYMINSTROBEDIST,//0x69 查询最小选通距离
LASERMAXSTROBEDIST,//0x6A 设置最大选通距离 camaraPara的值:0x00:表示无效;取值范围(10~20000)米
LASERQUERYMAXSTROBEDIST,//0x6B 查询最大选通距离
QUERYFPGAVER,//0x6C 查询 FPGA 软件版本号
QUERYMCUVER,//0x6D 查询 MCU 软件版本号
QUERYHARDWAREVER = 0x6E,//0x6E 查询硬件版本号
POINT_1_UPDATE = 0x6F, //更新靶点坐标
POINT_2_UPDATE = 0x70, //更新弹着点坐标
POINT_Measu_CLEAR = 0x71, //清除靶点和弹着点坐标
MG_PIP_ON = 0x78, //开启画中画dec(120)
MG_PIP_OFF = 0x79, //关闭画中画dec(121)
WHITE_BALANCE = 0x80, //白平衡模式,camaraPara的值:0x00表示全自动曝光,0x01表示户外,0x02户外自动,0x03单次白平衡
SENSOR_SATURATION = 0x87, //饱和度设置,camaraPara的取值范围0-100,50为不设置饱和度
SENSOR_TONE = 0x88, //色调设置,camaraPara的取值范围0-100,50为不设置色调
GIMBAL_MAGNIFI_CTL = 0x89, //吊舱倍率设置,camaraPara表示倍率,取值范围是1-30,最多小数点后一位
IMAGE_PUZZLE = 0x8A, //拼图
MG_INFRA_DIGIT_ZOOM=0xB2, //红外数字变焦开关,0关,1开
CONTRAST=0x8D //对比度调节,0增加对比度,1减少对比度
};5.8 吊舱角度控制
接口地址
POST /flightmonitor/v1/gimbal/gimbalGenera
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | SendGimbalGeneraForm | SendGimbalGeneraForm |
| clientId | 客户端(即站点编号) | true | string | ||
| gimbalGeneraForm | 吊舱通用设置参数 | false | GimbalGeneraForm | GimbalGeneraForm | |
| formatFlag | SD卡格式化标志,0x00表示无效,0x01表示格式化,0x02表示清空(暂时没用) | false | integer | ||
| frmCtl | 框架角锁定指令,0x00表示无效,0x01表示锁定框架角有效 | false | integer | ||
| panPara | 框架角锁定偏航角值,1e4,单位弧度 | false | integer | ||
| res0 | 保留字段 | false | integer | ||
| restart | 重启图像处理板,0x00表示无效,0x01表示重启(暂时没用) | false | integer | ||
| tiltPara | 框架角锁定俯仰角值,1e4,单位弧度 | false | integer | ||
| pilotId | 飞控ID | true | string |
请求示例
json
{
"clientId": "",
"gimbalGeneraForm": {
"formatFlag": 0,
"frmCtl": 0,
"panPara": 0,
"res0": 0,
"restart": 0,
"tiltPara": 0
},
"pilotId": ""
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.9 去雾开关控制
接口地址
POST /flightmonitor/v1/player/defog
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | 去雾控制 | 去雾控制 |
| clientId | 客户端(即站点编号) | true | string | ||
| pilotId | 飞控ID | true | string | ||
| state | 0关闭/1开启 | false | integer(int32) |
请求示例
json
{
"clientId": "",
"pilotId": "",
"state": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.10 电子稳像开关控制
接口地址
POST /flightmonitor/v1/player/electronicStableSwitch
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | 电子稳像控制 | 电子稳像控制 |
| clientId | 客户端(即站点编号) | true | string | ||
| pilotId | 飞控ID | true | string | ||
| state | 0关闭/1开启 | false | integer(int32) |
请求示例
json
{
"clientId": "",
"pilotId": "",
"state": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.11 吊舱手动跟踪
接口地址
POST /flightmonitor/v1/gimbal/setGimbalManualTrack
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | SetGimbalManualTrackForm | SetGimbalManualTrackForm |
| clientId | 客户端(即站点编号) | true | string | ||
| gimbalManualTrackForm | 吊舱手动跟踪具体参数 | true | GimbalManualTrackForm | GimbalManualTrackForm | |
| height | 跟踪图像范围-高,非负数 | true | integer | ||
| targetFlag | 0无效,1跟踪,2退出 | true | integer | ||
| width | 跟踪图像范围-宽,非负数 | true | integer | ||
| x | 跟踪图像坐标x,非负数 | true | integer | ||
| y | 跟踪图像坐标y,非负数 | true | integer | ||
| pilotId | 飞控ID | true | string |
请求示例
json
{
"clientId": "",
"gimbalManualTrackForm": {
"height": 0,
"targetFlag": 0,
"width": 0,
"x": 0,
"y": 0
},
"pilotId": ""
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.12 视频应用操作(开启ai识别)
接口地址
POST /flightmonitor/v1/video/operation/videoAppOperation
接口描述
请求数据类型
multipart/form-data
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| autopilotSn | 飞控编号 | query | false | string | |
| file | 上传的文件 | formData | false | file | |
| geoJson | geoJson | query | false | string | |
| kmlId | kmlId | query | false | string | |
| operationType | 操作类型 AI:1 AR:2 去雾:4 稳像:8 增强AR[AI辅助AR]:16 | query | false | ref | |
| planNo | planNo | query | false | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.13 飞前准备-环境检查强制通过
接口地址
GET /hangar/v1/planExecuteInHangar/environmentalInspectForcedPassage
接口描述
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | planNo | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.14 飞前准备-载荷检查强制通过
接口地址
GET /hangar/v1/planExecuteInHangar/loadInspectForcedPassage
接口描述
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | planNo | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.15 飞前准备-重新载荷检查
接口地址
GET /hangar/v1/planExecuteInHangar/loadInspectAgain
接口描述
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | planNo | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.16 飞前准备-重新同步降落机库信息
接口地址
GET /hangar/v1/planExecuteInHangar/synHangarInfoAgain
接口描述
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | planNo | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.17 飞前准备-重新同步航线
接口地址
GET /hangar/v1/planExecuteInHangar/synRouteAgain
接口描述
请求数据类型
application/x-www-form-urlencoded
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| planNo | planNo | query | true | string |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.18 喊话器文本播放
接口地址
POST /flightmonitor/v1/megaphone/playByTxt
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| textData | 文本内容 | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "070902050101202504181000",
"pilotId": "",
"textData": "",
"wayPointIndex": 0
}响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.19 喊话器音量设置
接口地址
POST /flightmonitor/v1/megaphone/megaphoneVolume
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| volume | 音量大小 范围再0-100,0为静音 | true | integer(int32) | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"volume": 0,
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.20 喊话器-播放文件列表
接口地址
POST /flightmonitor/v1/megaphone/megaphoneFileList
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.21 喊话器-状态信息
接口地址
POST /flightmonitor/v1/megaphone/getMegaphoneInfo
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«BaseInfoVO«MegophoneInfoVO»» |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | BaseInfoVO«MegophoneInfoVO» | BaseInfoVO«MegophoneInfoVO» | |
| info | MegophoneInfoVO | MegophoneInfoVO | |
| deleteFileName | 正在删除的音频文件名 | string | |
| enableFPV | 喊话器FPV使能状态 0.无,1.未使能 2.使能 | integer | |
| fileList | 喊话器列表 | array | string |
| fileListStatus | 音频文件列表状态 0.无,1.正在上传,2.正在清空,3.正在删除指定文件 | integer | |
| fileName | 当前播放文件名 | string | |
| fpvstatus | FPV工作状态 0.无,1.正常,2.异常 | integer | |
| gimbalMode | 喊话器云台模式: 0.跟随吊舱 1.手动控制 | integer | |
| payloadSN | 多旋翼-成至 | string | |
| pitching | 俯仰角 | integer | |
| playFileName | 正在播放的音频文件名 | string | |
| playFileNumber | 音频文件数量 | integer | |
| playFunc | 喊话器功能状态 0未播放 1暂停播放 2正在播放/喊话 | integer | |
| playMode | 播放设置 0单曲循环 1顺序播放 2随机喊话 3实时喊话 | integer | |
| power | 喊话器状态 0:关 1:开 | integer | |
| speed | 喊话速度 | integer | |
| state | 播放状态 0无播放/1音频播放中/2文本播放中 | integer | |
| tone | 喊话器音色 | integer | |
| volume | 音量 | integer | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"info": {
"deleteFileName": "",
"enableFPV": 0,
"fileList": [],
"fileListStatus": 0,
"fileName": "",
"fpvstatus": 0,
"gimbalMode": 0,
"payloadSN": "",
"pitching": 0,
"playFileName": "",
"playFileNumber": 0,
"playFunc": 0,
"playMode": 0,
"power": 0,
"speed": 0,
"state": 0,
"tone": 0,
"volume": 0
}
},
"msg": "",
"success": true
}5.22 喊话器-手动方位设置
接口地址
POST /flightmonitor/v1/megaphone/megaphoneControl
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| pan | 喊话器偏航角 [0,360],目前暂无使用 | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| pitch | 喊话器俯仰角 [0,90] | true | integer(int32) | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"pan": 0,
"payloadSN": "",
"pilotId": "",
"pitch": 0,
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.23 喊话器-开始播放
接口地址
POST /flightmonitor/v1/megaphone/megaphonePlay
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.24 喊话器-播放模式设置
接口地址
POST /flightmonitor/v1/megaphone/megaphonePlayMode
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| playMode | 播放模式 0单曲循环 1顺序播放 2随机喊话 3实时喊话 | true | integer(int32) | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"playMode": 0,
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.25 喊话器-播放切换(上一曲和下一曲)
接口地址
POST /flightmonitor/v1/megaphone/megaphonePlayTrack
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | true | string | ||
| pilotId | 飞控ID | false | string | ||
| playTrack | 播放切换 1:上一曲,2:下一曲 | true | integer(int32) | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"playTrack": 0,
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.26 喊话器-新增音频文件(支持txt与mp3格式)
接口地址
POST /flightmonitor/v1/megaphone/megaphoneUploadFile
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | query | true | string | |
| enableFlag | 标志使能,0:立即执行 1:航点执行, | query | true | integer(int32) | |
| fileName | 文件名称 【播放指定音频文件、删除指定文件】 | query | true | string | |
| payloadSN | 载荷SN | query | false | string | |
| pilotId | 飞控ID | query | true | string | |
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | query | true | integer(int32) | |
| file | file | formData | false | array | file |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.27 喊话器-暂停播放
接口地址
POST /flightmonitor/v1/megaphone/pauseMegaphone
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.28 喊话器-播放指定音频文件
接口地址
POST /flightmonitor/v1/megaphone/playByAudioFile
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| fileName | 文件名称 【播放指定音频文件、删除指定文件】 | true | string | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"fileName": "",
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.29 喊话器-方位跟随吊舱设置
接口地址
POST /flightmonitor/v1/megaphone/voiceFollowPod
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.30 探照灯-灯光控制
接口地址
POST /flightmonitor/v1/searchlight/LightControl
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| frequency | 爆闪频率 | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| type | 照明类型:0-常亮开启、1-常亮关闭、2-爆闪开启、3-爆闪关闭 | true | integer(int32) | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
plain
{
"clientId": "",
"enableFlag": 0,
"frequency": 0,
"payloadSN": "",
"pilotId": "",
"type": 0,
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.31 探照灯-跟随吊舱
接口地址
POST /flightmonitor/v1/searchlight/LightAutoSwitch
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| controlMode | 探照灯随动开关 1开(跟随吊舱)/0关(独立控制) | true | integer(int32) | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
plain
{
"clientId": "",
"controlMode": 0,
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.32 探照灯-手动方位控制
接口地址
POST /flightmonitor/v1/searchlight/directManualCtl
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| heading | 偏航角 [0,360] | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| pitch | 喊话器俯仰角 [0,90] | true | integer(int32) | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
plain
{
"clientId": "",
"enableFlag": 0,
"heading": 0,
"payloadSN": "",
"pilotId": "",
"pitch": 0,
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.33 探照灯-爆闪频率控制
接口地址
POST /flightmonitor/v1/searchlight/frequencyControl
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| frequency | 爆闪频率 | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| type | 照明类型:0-常亮开启、1-常亮关闭、2-爆闪开启、3-爆闪关闭 | true | integer(int32) | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
plain
{
"clientId": "",
"enableFlag": 0,
"frequency": 0,
"payloadSN": "",
"pilotId": "",
"type": 0,
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.34 探照灯-状态信息
接口地址
POST /flightmonitor/v1/searchlight/getLightInfo
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
plain
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«BaseInfoVO«LightInfoVO»» |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | BaseInfoVO«LightInfoVO» | BaseInfoVO«LightInfoVO» | |
| info | LightInfoVO | LightInfoVO | |
| controlMode | 探照灯控制模式 1开(跟随吊舱)/0关(独立控制) | integer | |
| drivingTemperature | 驱动温度 | integer | |
| frequency | 灯光频率 | integer | |
| heading | 偏航值 | integer | |
| luminance | 灯光亮度 | integer | |
| mode | 状态 0(关)/1(开)/2(爆闪)/3(常亮) | integer | |
| pitching | 俯仰值 | integer | |
| temperature | 灯芯温度 | integer | |
| msg | string | ||
| success | boolean |
响应示例
plain
{
"code": 0,
"data": {
"info": {
"controlMode": 0,
"drivingTemperature": 0,
"frequency": 0,
"heading": 0,
"luminance": 0,
"mode": 0,
"pitching": 0,
"temperature": 0
}
},
"msg": "",
"success": true
}5.35 探照灯-设置亮度
接口地址
POST /flightmonitor/v1/searchlight/setLuminance
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| luminance | 亮度设置 范围0-100 | true | integer(int32) | ||
| payloadSN | 载荷SN | false | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
plain
{
"clientId": "",
"enableFlag": 0,
"luminance": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.36 多旋翼八方向控制
接口地址
/monitor/{token}
接口描述
使用websocket链接
请求数据类型
application/json
响应数据类型
/
请求参数
| 参数名称 | 参数说明 | 必须 | 数据类型 |
|---|---|---|---|
| clientId | 客户端(即站点编号) | true | string |
| type | 请求动作类型 Aileron:副翼,半自动模式下控制水平左右速度,value大于1500无人机水平右移;小于1500无人机水平左移(Y轴向右) Elevator:升降,控制水平前后速度,大于1500无人机水平前移;小于1500无人机水平后移(X轴向前) Throttle:油门,控制水平垂直速度,大于1500无人机垂直上升;小于1500无人机垂直向下 Rudder:方向,控制Z轴旋转速度,大于1500无人机正方向转动;小于1500无人机负方向转动(Z轴向下) Stop:停止半自动控制模式 | true | string |
| value | 范围[1000,2000],1500为摇杆居中 | true | integer(int32) |
| pilotId | 飞控ID | true | string |
请求示例
json
{
"clientId": "hangar123",
"value": 1800,
"type": "Aileron",
"pilotId": "10852221"
}5.37 抛投器-获取抛投器状态
接口地址
POST /flightmonitor/v1/throwerCtrl/getThrowerCtrlStatus
接口描述
请求数据类型
application/json
响应数据类型
/
请求参数
| *参数名称* | *参数说明* | *请求类型* | *必须* | *数据类型* | *schema* |
|---|---|---|---|---|---|
| form | form | body | true | PayloadBaseForm | PayloadBaseForm |
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | true | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
请求示例
plain
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
plain
{
"code": 0,
"data": {
},
"msg": "",
"success": true
}5.38 抛投器-获取抛投器状态和激光状态信息
接口地址
POST /flightmonitor/v1/throwerCtrl/getThrowerInfo
接口描述
请求数据类型
application/json
响应数据类型
/
请求示例
plain
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | PayloadBaseForm | PayloadBaseForm |
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | true | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj«ThrowerVO» |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | ThrowerVO | ThrowerVO | |
| ctrlStatusVO | 抛投器状态 | ThrowerCtrlStatusVO | ThrowerCtrlStatusVO |
| front | 前挂状态 | boolean | |
| left | 左挂状态 | boolean | |
| rear | 后挂状态 | boolean | |
| right | 右挂状态 | boolean | |
| laserStatusVO | 抛投器激光状态 | ThrowerLaserStatusVO | ThrowerLaserStatusVO |
| laserState | 激光状态 | boolean | |
| power | //抛投器状态 0:上锁(关) 1:解锁(开) 2:机械卡位 3:数据错误 | integer(int32) | |
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {
"ctrlStatusVO": {
"front": true,
"left": true,
"rear": true,
"right": true
},
"laserStatusVO": {
"laserState": true
},
"power": 0
},
"msg": "",
"success": true
}5.39 抛投器-获取抛投器激光状态
接口地址
POST /flightmonitor/v1/throwerCtrl/getThrowerLaserStatus
接口描述
请求数据类型
application/json
响应数据类型
/
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | PayloadBaseForm | PayloadBaseForm |
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | true | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.40 抛投器-设置抛投器功能
接口地址
POST /flightmonitor/v1/throwerCtrl/setThrowerCtrl
接口描述
请求数据类型
application/json
响应数据类型
/
请求示例
json
{
"clientId": "",
"enableFlag": 0,
"funcType": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | ControlThrowerCtrlForm | ControlThrowerCtrlForm |
| clientId | 客户端(即站点编号) | true | string | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| funcType | _ 0-连接发送请求\n _ 1-抛投前\n _ 2-抛投后\n _ 3-抛投左\n _ 4-抛投右\n _ 5-抛投全部\n _ 6-顺序抛投\n _ 7-开启激光器\n * 8-关闭激光器 | true | integer(int32) | ||
| payloadSN | 载荷SN | true | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}5.41 抛投器-抛投器开关
接口地址
POST /flightmonitor/v1/throwerCtrl/switchThrowerCtrl
接口描述
请求数据类型
application/json
响应数据类型
/
请求示例
json
{
"clientId": "",
"cmd": 0,
"enableFlag": 0,
"payloadSN": "",
"pilotId": "",
"wayPointIndex": 0
}请求参数
| 参数名称 | 参数说明 | 请求类型 | 必须 | 数据类型 | schema |
|---|---|---|---|---|---|
| form | form | body | true | SwitchThrowerCtrlForm | SwitchThrowerCtrlForm |
| clientId | 客户端(即站点编号) | true | string | ||
| cmd | 开关 1开/0关 | true | integer(int32) | ||
| enableFlag | 标志使能,0:立即执行 1:航点执行, | true | integer(int32) | ||
| payloadSN | 载荷SN | true | string | ||
| pilotId | 飞控ID | true | string | ||
| wayPointIndex | 任务航点编号,当航点控制使能时,请求在无人机达到航点时响应 | true | integer(int32) |
响应状态
| 状态码 | 说明 | schema |
|---|---|---|
| 200 | OK | ResultMsgObj |
| 201 | Created | |
| 401 | Unauthorized | |
| 403 | Forbidden | |
| 404 | Not Found |
响应参数
| 参数名称 | 参数说明 | 类型 | schema |
|---|---|---|---|
| code | integer(int32) | integer(int32) | |
| data | object | ||
| msg | string | ||
| success | boolean |
响应示例
json
{
"code": 0,
"data": {},
"msg": "",
"success": true
}**6.**机库上报运行数据
6.1 通信方式:mqtt
6.2 主题
复合翼机库上报主题:/cloud/site_data/post/{机库编号}
多旋翼机库上报主题:/cloud/site_data/p200_post/{机库编号}
6.3 协议内容
内容:
| 字段 | 内容 | 类型 | 备注 |
|---|---|---|---|
| osInfo:系统信息 | |||
| hangarType | 机库类型 | string | |
| packsSoftwareVersion | 机库软件包版本号 | string | |
| firmwarePack | 固件包版本号 | string | |
| osRunTime | 系统运行时间 | string | |
| osVersion | 系统版本 | string | |
| cpuInfo | Cpu信息 | string | |
| boardInfo | 主板信息 | string | |
| board1:主控 1 信息 | |||
| version | 主控 1 软件版本 | string | |
| isM2Connect | 伺服主控连接状 态 | bool | true已连接,false 未连接 |
| isPowerBoadConnect | 电源板连接状态 | bool | true已连接,false 未连接;为false时,飞行器状态为离线 |
| isGCSConnect | GCS1000 连接状 态 | bool | true已连接,false 未连接 |
| uavState | 无人机状态 | string | 无人机状态枚举见6.5.4 |
| execTaskStep | 执行任务步骤 | string | 任务步骤枚举见6.5.1 |
| loadType | 载荷类型 | string | |
| isUnlockNoAir | 是否解锁无人机 | bool | true已解锁,false 未解锁 |
| isNetRelay1Con nect | 网络继电器 1 连 接状态 | bool | true已连接,false 未连接 |
| isNetRelay2Con nect | 网络继电器 2 连 接状态 | bool | true已连接,false 未连接 |
| isApPowerOff | AP 电源是否关闭 | bool | true已关闭,false 未关闭 |
| vEast | 地速(东) | double | m/s |
| vDown | 地速(地) | double | m/s |
| errorInfos | 错误信息 | Array< string > | |
| operationInfos | 操作信息 | Array< string > | |
| timeOutCount | 单步超时剩余时 间 | in t | 单位:s |
| taskName | 指定任务名称 | string | |
| cpuTemp | CPU 温度 | double | 单位: °C 摄氏度 |
| cpuLoad | CPU 负载 | double | 单位:%百分比 |
| ramLoad | 内存负载 | double | 单位:%百分比 |
| board2:主控 2 信息 | |||
| chargerSwitchS tate | 充电开关状态 | bool | |
| airConditioner SwitchState | 空调开关状态 | Array< bool > | |
| heatingWireSwi tchState | 加热丝总开关状 态 | Array< bool > | |
| fanSwitchState | 风扇开关状态 | bool | |
| temperatureAut oSwitchState | 温控自动开关状 态 | bool | |
| fireModeAutoSw itchState | 消防自动开关状 态 | bool | |
| fireSwitchStat e | 消防开关状态 | bool | |
| pcFireSwitchSt ate | 信息柜消防开关 状态 | bool | |
| noPlaneSwitchS tate | 无飞机模式开关 状态 | bool | |
| apSwitchState | AP 开关状态 | bool | |
| m2_StateMachin e | 伺服主控状态 | string | |
| m2_Temperature | 机库内部温度 | double | 单位: °C 摄氏度 |
| m2_InternalHum idity | 机库内部湿度 | double | |
| m2_OutsideTemp erature | 机库外部温度 | double | |
| m2_Rainfall | 机库外部降雨量 | double | |
| m2_WindSpeed | 机库外部风速 | double | |
| m2_WindDirecti on | 机库外部风向 | in t | |
| m2_AirPressure | 机库外部气压 | double | |
| m2_Humidity | 机库外部湿度 | double | |
| m2_AirConditio nerHeatTempera ture | 空调加热温度 | Array< double > | |
| m2_AirConditio nerCoolTempera ture | 空调制冷温度 | Array< double > | |
| m2_HeatingWire Temperature | 加热丝温度 | double | |
| m2_WeatherData Valid | 机库外部气象数 据是否有效 | bool | |
| m2_SetTakeOffA ngle | 配置起飞角度 | in t | |
| m2_SetLoadAngl e | 配置降落角度 | in t | |
| m2_UPS_Power | UPS 电源 | double | |
| m2_UPS_SetMinP ower | UPS 最低起飞电 量 | double | |
| m2_ErrorCode | 错误码 | in t | |
| m2_ErrorState | 错误状态 | string | |
| m2_ErrorCodes | 错误码列表 | Array< string > | |
| lux | 光照度 | in t | |
| rainAll | 传感器累计降雨 量 | double | |
| rain10min | 传感器前 10 分钟 降雨量 | double | |
| rain1h | 传感器前 1 小时 降雨量 | double | |
| canCharger | 可以充电开关状 态 | bool | |
| smok | 烟雾传感器值 | in t | |
| inputVoltage | 输入电压 | in t | |
| outputCurrent | 输入电流 | in t | |
| chargerElectro deTemp | 充电电极温度 | Array< double > | -100 表示无效 |
| chargerTemp | 充电器温度 | double | -100 表示无效 |
| chargerCurrent | 充电器电流 | double | -100 表示无效 |
| chargerVoltage | 充电器电压 | double | -100 表示无效 |
| chargerStatus | 充电器状态 | in t | |
| cpuTemp | CPU 温度 | double | 单位: °C 摄氏度 |
| cpuLoad | CPU 负载 | double | 单位:%百分比 |
| ramLoad | 内存负载 | double | 单位:%百分比 |
| version | 主控 2 软件版本 | string | |
| autoTempH | 自动开启空调温 度上限 | in t | |
| autoTempL | 自动开启空调温 度下限 | in t | |
| inputIO | 输入 IO 列表 | Array | -1 表示无效 |
| outputIO | 输出 IO 列表 | Array | -1 表示无效 |
| uavState | 无人机状态 | string | 见枚举 |
| powerBoad:电源板信息 | |||
| dischargeVolta ge | 放电电压 | double | |
| dischargeCurre | 放电电流 | double | |
| chargeVoltage | 充电电压 | double | |
| chargeCurrent | 充电电流 | double | |
| chargeSwitch | 充电开关状态 | bool | |
| powerSwitch | 电源开关状态 | bool | 为false时,飞行器状态为下电 |
| batterSoc | 电池剩余容量 | in t | |
| batterStatus | 电池状态 | in t | |
| errCnt | 错误计数 | in t | |
| temp1 | 温度 1 | double | |
| Temp2 | 温度 2 | double | |
| storgeCapacity Max | 储能模式最大值 | in t | |
| storgeCapacity Min | 储能模式最小值 | in t | |
| chargeSate | 充电模式 | string | |
| netRelay1:网络继电器 1 | |||
| video | 图传开关 | bool | |
| gcs | GCS1000 开关 | bool | |
| light | 照明灯开关 | bool | |
| netRelay2: 网络继电器 2 | |||
| ap | AP 开关 | bool | |
| light | 网络继电器 2补光灯状态 | bool |
6.4 复合翼机库示例数据
json
{
"osInfo": {
"hangarType": "JOS_P200", //机库类型
"packsSoftwareVersion": "1.0.0", //机库软件包版本号
"firmwarePack": "p200_rk3588_5t", //固件包版本号
"osRunTime": "2d-4h-19m-32s", //操作系统运行时间
"osVersion": "Debian GNU/Linux 12 (bookworm)", //操作系统版本
"cpuInfo": "Rockchip RK3588", // CPU信息
"boardInfo": "Radxa ROCK 5B+" //主控板信息
},
"board1": {
"hangarUniqueId": "xxx", //机库唯一ID
"version": "3.1.7.x", //主控1软件版本
"isM2Connect": true, //伺服主控连接状态
"isPowerBoadConnect": false, //电源板连接状态
"isGCSConnect": false, //GCS1000连接状态
"execTaskStep": "none", //执行任务步骤
"uavState": "powerOff", //无人机状态
"loadType": "none", //载荷类型
"isUnlockNoAir": false, //是否解锁无人机
"isNetRelay1Connect": true, //网络继电器1连接状态
"isNetRelay2Connect": false, //网络继电器2连接状态
"isApPowerOff": false, //AP电源是否关闭
"operationInfos": [], //操作信息
"timeOutCount": 0, //单步超时剩余时间,单位s
"taskName": "", //指定任务名称
"errorCodes": [
//错误码列表
"飞机充电异常",
"飞机异常离线"
],
"cpuTemp": -100, //CPU温度
"cpuLoad": -1, //CPU负载
"ramLoad": -1, //内存负载
"time": "2024-04-12 11:20:31", //数据帧时间戳
"runTime": "0d-0h-39m-43s", //软件启动后运行时间
"osVersion": "Microsoft Windows 10.0.19045", //操作系统版本
"cpuInfo": "Intel Celeron J4125", //CPU信息
"airSpeedCheckTimes": 0, //空速自检次数
"dynamicCheckTimes": 0 //动态力自检次数
},
"board2": {
"m2_AllSwitchState": {
"chargerSwitchState": false, //充电开关状态
"airConditionerSwitchState": [
false, //空调A开关状态
false //空调B开关状态
],
"heatingWireSwitchState": [
false, //加热丝总开关状态
false, //加热丝A开关状态
false, //加热丝B开关状态
false, //加热丝C开关状态
false, //加热丝D开关状态
false //加热丝E开关状态
],
"fanSwitchState": false, //风扇开关状态
"temperatureAutoSwitchState": false, //温控自动开关状态
"fireModeAutoSwitchState": false, //消防自动开关状态
"fireSwitchState": false, //消防开关状态
"pcFireSwitchState": false, //信息柜消防开关状态
"noPlaneSwitchState": false, //无飞机模式开关状态
"apSwitchState": false //AP开关状态
},
"m2_StateMachine": "WaitingServoReset", //伺服主控状态机
"m2_Temperature": 19.2, //机库内部温度
"m2_InternalHumidity": 32.2, //机库内部湿度
"m2_OutsideTemperature": 3.9, //机库外部温度
"m2_Rainfall": 0, //机库外部降雨量
"m2_WindSpeed": 0.9, //机库外部风速
"m2_WindDirection": 115, //机库外部风向
"m2_AirPressure": 973, //机库外部气压
"m2_Humidity": 79.3, //机库外部湿度
"m2_AirConditionerHeatTemperature": [
0, //空调A加热温度
0 //空调B加热温度
],
"m2_AirConditionerCoolTemperature": [
0, //空调A制冷温度
0 //空调B制冷温度
],
"m2_HeatingWireTemperature": 0, //加热丝温度
"m2_WeatherDataValid": false, //机库外部气象数据是否有效
"m2_SetTakeOffAngle": 390, //配置起飞角度
"m2_SetLoadAngle": 0, //配置降落角度
"m2_UPS_Power": 100, //UPS电源
"m2_UPS_SetMinPower": 10, //UPS最低起飞电量
"m2_ErrorCode": 0, //错误码
"m2_ErrorState": "warning", //错误状态
"m2_ErrorCodes": [
//错误码列表
"空调A通信故障",
"空调B通信故障",
"充电器通信故障",
"电气柜1门打开",
"电气柜2门打开",
"充电电极温度传感器通信故障"
],
"lux": 7660, //光照度
"rainAll": 0, //传感器累计降雨量
"rain10min": 0, //传感器前10分钟降雨量
"rain1h": 0, //传感器前1小时降雨量
"canCharger": false, //可以充电开关状态
"smok": 0, //烟雾传感器值
"inputVoltage": -1, //输入电压
"outputCurrent": -1, //输出电流
"chargerElectrodeTemp": [
-100, //充电电极温度1 -100表示无效
-100 //充电电极温度2 -100表示无效
],
"chargerTemp": -100, //充电器温度 -100表示无效
"chargerCurrent": -100, //充电器电流 -100表示无效
"chargerVoltage": -100, //充电器电压 -100表示无效
"chargerStatus": 0, //充电器状态
"cpuTemp": -100, //CPU温度 -100表示无效
"cpuLoad": -1, //CPU负载 -1表示无效
"ramLoad": -1, //内存负载 -1表示无效
"version": "9.9.0", //主控2软件版本
"autoTempH": 35, //自动开启空调温度上限
"autoTempL": 0, //自动开启空调温度下限
"inputIO": [
//输入IO列表 -1表示无效
-1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1
],
"outputIO": [
//输出IO列表 -1表示无效
-1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1
]
},
"powerBoad": {
"dischargeVoltage": 57.495, //放电电压
"dischargeCurrent": 0.381, //放电电流
"chargeVoltage": 57.495, //充电电压
"chargeCurrent": 0, //充电电流
"chargeSwitch": false, //充电开关状态
"powerSwitch": false, //无人机电源开关状态
"batterSoc": 95, //电池剩余电量
"batterSoh": 99, //电池健康状态
"batterCycle": 1, //电池循环次数
"batterBMSWarn": 0, //电池BMS报警状态
"batterStatus": 1, //电池状态
"errCnt": 0, //错误计数
"temp1": 23, //电池温度1 ,温度传感器个数为2个,该数值有效
"temp2": 24, //电池温度2 ,温度传感器个数为2个,该数值有效
"temps": [
//温度传感器为7个,该数值有效
56, //均衡电阻温度
23, //电池温度1
24, //电池温度2
37, //放电mosfet温度
37, //采样电阻温度
38, //充电mosfet温度
34 //焊盘温度
],
"storgeCapacityMax": 80, //储能模式最大值
"storgeCapacityMin": 50, //储能模式最大值
"chargeSate": "storge", //管理模式
"batterVoltages": [
//单体电池电压,温度传感器个数为7个,该数值有效
4.107, 4.105, 4.106, 4.107, 4.107, 4.107, 4.107, 4.107, 4.107, 4.107,
4.107, 4.107, 4.107, 4.107, -8.041, 0
],
"tempNum": 7 //温度传感器数量
},
"netRelay1": {
//网络继电器1 开关状态
"video": false, //图传开关
"gcs": false, //GCS1000开关
"light": false //照明灯开关
},
"netRelay2": {
"ap": false, //AP开关
"light": false //网络继电器 2补光灯状态
},
"weatherStation": {
//外置气象站数据
"rain": 7.359147548675537, //传感器总降雨量单位mm
"windSpeed": 0, //传感器实时风速 m/s
"windDir": 0, //实时风向 0-360度
"temp": 28.900000000000002, //温度 摄氏度
"humi": 76.7, //湿度 %
"press": 911, //气压 hPa
"light": 13000, // 光照度 lx
"tenMinRain": 0, // 10分钟降雨量 mm
"threeMinWindSpeed": 0.84, // 3分钟最高风速 m/s
"threeMinWindDir": 31.0625 // 3分钟平均风向 0-360度
},
"configInfo": {
//配置信息
"gpsData_M": {
//主降点
"latitude": 30.521118544899675,
"longitude": 104.18266627470172,
"altitude": 524.989
},
"gpsData_S": {
//备降点
"latitude": 30.521152922367378,
"longitude": 104.1826215839937,
"altitude": 525.71
}
}
}6.5 多旋翼机库示例数据
json
{
"osInfo":{
"hangarType": "JOS_P200",//机库类型
"packsSoftwareVersion": "1.0.0",//机库软件包版本号
"firmwarePack":"p200_rk3588_5t", //固件包版本号
"osRunTime": "02d-12h-10m-29s",//系统运行时间
"osVersion": "6.1.84-6-rk2410",//操作系统版本
"cpuInfo": "Debian GNU/Linux 12 (bookworm)",// 操作系统信息
"boardInfo": "Radxa ROCK 5B+" // 主板信息
}
"board1": {
"hangarUniqueId": 0,//机库唯一ID (uint32)
"version": "5.0.0",//版本号
"isM2Connect": false,//是否连接M2
"isPowerBoadConnect": false,//是否连接电源板
"isGCSConnect": false,//是否连接GCS1000
"execTaskStep": "none",//执行任务步骤
"uavState": "connecting",//飞机状态
"loadType": "None",//载荷类型
"isUnlockNoAir": false,//是否解锁无飞机
"operationInfos": [],//操作信息
"timeOutCount": 0,//单步超时次数
"taskName": "",//任务名称
"cpuTemp": 45,// CPU温度
"cpuLoad": 11.000604,// CPU负载
"ramLoad": 88.92069,// RAM负载
"time": "2025-04-14 14:34:02",//帧时间
"runTime": "0d-0h-0m-13s",//软件运行时间
"osRunTime": "0d-4h-59m-16s",//系统运行时间
"osVersion": "Microsoft Windows 10.0.26100",//操作系统版本
"cpuInfo": "12th Gen Intel Core i7-12700H", //CPU信息
"errorCodes": [] ,//运行错误代码
"dynamicCheckTimes": 0,//动态自检次数
},
"board2": {
"errorState": 0,//错误状态
"workStatus": {//工作状态
"uavInplace": false,//飞机到位
"chargerSwitch": [
false,//充电器1开关
false,//充电器2开关 取消
false//充电器3开关 取消
],
"gcs1000Switch": false,//GCS1000开关
"videoTransSwitch": false, //图传开关
"acPower": false,//市电供电开关
"isUpsCharge": false,//UPS充电开关
"isUavExternalPowerOn": false,//飞机外部供电开关
"isAirConditionerOn": false,//空调开关
"isFillLightOn": false,//补光灯开关
"isFixedDoor": false,//固定门开关
"isEmergencyStop": false,//急停开关
"isFire": false,//消防开关
"isJogMode": false, //点动模式开关
"isFireSwOn": false, //消防开关
"isPowerOnReset": false, //上电复位开关
"isNoPlanMode": false, //无飞机模式开关
"netWireConnected": false //网线连接状态
},
"batterStatus": { //电池状态
"chargerCurrent": [ //充电器电流
0,
0,
0
],
"batteryVoltage": [ //电池电压
0,
0,
0
],
"upsVoltage": 0, //UPS电压
"batteryIn": [ //电池入仓状态
false,
false,
false,
false,
false,
false
],
"batteryReady": [ //电池就绪状态
false,
false,
false
]
},
"environmentStatus": {//环境状态
"outdoorTemperature": 0,//室外温度
"roomTemperature": 0, //室内温度
"roomHumidity": 0, //室内湿度
"atmosphericPressure": 0, //大气压力
"smoke": 0, //烟雾浓度
"lightIntensity": 0 //光照强度
},
"p200State": 0, //机库状态
"uavAngle": { //飞机角度
"pitch": 0, //俯仰角
"roll": 0, //横滚角
"yaw": 0 //偏航角
},
"m2_ErrorCodes": [], //M2错误代码
"plcVersion": "0.0", //PLC版本号
"touchScreenVersion": "0.0" //触摸屏版本号
},
"netRelay1": { //暂未确定
"video": false,
"gcs": false,
"alarmLight": false,
"light": false,
},
"weatherStation": { //气象站
"rain": 0, //雨量
"windSpeed": 0, //风速
"windDir": 0, //风向
"temp": 0, //温度(P200 无)
"humi": 0, //湿度(P200 无)
"press": 0, //气压(P200 无)
"light": 0, //光照(P200 无)
"tenMinRain": 0, //十分钟雨量
"hourRain": 0, //小时雨量
"threeMinWindSpeed": 0, //三分钟风速
"threeMinWindDir": 0, //三分钟风向
"threeMaxLight": 0 //三分钟最大光照(P200 无)
},
"configInfo": {//配置信息
"gpsData_M": {//主降点
"latitude": 30.521118544899675,
"longitude": 104.18266627470172,
"altitude": 524.989
},
"gpsData_S": {//备降点
"latitude": 30.521152922367378,
"longitude": 104.1826215839937,
"altitude": 525.71
}
}
}6.6 枚举值
6.6.1 任务状态枚举
c
enum ExecTaskStep
{
none = 0,//无
powerOn,//上电
waitWayPoint,//等待航线
preCheck,//预检
chargerStop,//充电机停止
resetM2,//复位机库
airSpeedCheck,//空速自检
takeOff,//展开
switchToVideo,//切换到图传
waitingFix,//等待定位
waitingHeading,//等待航向对准
checkVideo,//检测图传
chechImpetus,//检测动力
loadCheck,//载荷检测
waitingForTakeOff,//等待起飞
TakeOffIng,//起飞中
waitingLevelFlight,//等待平飞
closeDoor,//关闭门
executeTaskIng,//执行任务中
openDoor,//打开门
waitingForLanding,//等待降落
loadStatic,//载荷静置
switchToAp,//切换到AP
recycle,//回收
checkAp,//检测AP
success,//成功
fail,//失败
manualStop,//手动停止
};6.6.2 机库状态枚举
c
public enum StateMachine_En
{
Init = 0,//初始化
SelfCheck = 1,//自检
WaitingServoReset = 2,//待伺服重置
ServoReseting = 3,//重置伺服中
Standby = 4,//待机
TakeOffing = 5,//放飞中
WaitingFly = 6,//等待起飞
Closing = 7,//关仓中
WaitingLandCloseDoor = 8,//关仓待降
OpenDooring = 9, //开仓中
WaitingLand = 10,//等待降落
Recycle = 11, //回收中
RecycleFinish = 12,//回收完成
Manual = 20, // 手动模式
Fault = 21, // 故障模式
Stoping = 22, // 停止中模式
EmergencyStop = 23, // 急停模式
ClearFault = 24, // 清除故障模式
HardEmergencyStop = 25,//硬件急停
FORCE_UNFOLD = 26, // 强制展开模式
FIRE_PROTECTION = 27, // 消防保护模式
LOCAL = 28, // 本地模式
ChangeBattery = 29, // 换电池模式
FastChangeBattery = 30, // 快速换电池模式
MULTISPECTRAL_UP = 31, // 多光谱标定升
MULTISPECTRAL_CALIBRATION = 32, // 多光谱标定
MULTISPECTRAL_DOWN = 33 // 多光谱标定降
};6.6.3 机库运行状态枚举
c
enum m2_ErrorState
{
normalRun, //正常运行
warning, //警告
seriousWarning, //严重警告
fatalError, //致命错误
}6.6.4 无人机状态枚举
json
public enum UavState
{
offline = 0,//离线
connecting = 1,//连接中
powerOff = 2,//关机
standBy = 3,//待机
tasking = 4,//任务中
}**7.**飞机上报遥测数据
7.1 通信方式:mqtt
7.2 主题:/jopc- {机库编号}/pushTelemetry
7.3 协议内容
内容:
| 字段 | 内容 | 类型 | 备注 |
|---|---|---|---|
| standardData | 标准遥测信息 | struct | |
| »isConnected | 飞机是否断连 | bool | true 正常,false 断连 |
| »warnType | 围栏告警信息 | int | 0 无风险;1 三级缓冲区(发 现),2 二级缓冲区(靠近),3 一级缓冲区(抵达),4 地面风 险 |
| »navStatus | 导航状态 | int | 0 INIT,1 A_AHRS,2 A_NORMAL, 3 AHRS,4 GPS_INS |
| »singleDualLink | 单双链路 | bool | true 双链路,false 单链路 |
| »timeStamp | 时间戳 | double | 从 1970-01-01:00:00:00 到现 在的毫秒数 |
| »uavLat | 飞机纬度 | double | |
| »uavLon | 飞机经度 | double | |
| »uavHMSL | 飞机高度 | double | |
| »vGnd | 地速 | double | |
| »vNorth | 地速(北) | double | 单位:m/s,无人机在北向的速度分量,正值表示向北运动,负值表示向南运动 |
| »vEast | 地速(东) | double | 单位:m/s,无人机在东向的速度分量,正值表示向东运动,负值表示向西运动 |
| »vDown | 地速(地) | double | 单位:m/s,无人机在垂直向下的速度分量,正值表示向下运动(如俯冲、下沉),负值表示向上运动(如爬升、上升) |
| »numSV | 卫星数 | int | |
| »pDOP | GPS 精度 | double | |
| »tAS | 空速 | double | |
| »rPM | 转速 | int | |
| »leftRPM | 左发动机转速 | int | |
| »rightRPM | 右发动机转速 | int | |
| »throttle | 油门指令 | int | |
| »uavPitch | 飞机俯仰 | double | |
| »uavYaw | 飞机偏航 | double | |
| »uavRoll | 飞机滚转 | double | |
| »mainPowerV | 主电压 | double | |
| »mainPowerA | 动力电压 | double | |
| »apMode | 飞行状态 | int | 参考飞行状态枚举7.3.1和7.3.2 |
| »photoNum | 照片反馈数量 | int | |
| »tracker | 导航点序号 | int | |
| »takeOff | 起飞状态 | bool | 0:无法起飞 1:可以起飞 |
| »gpsHeading | GPS 航向角 | double | |
| »rtkExtSolSt at | rtk 状态 | double | |
| »flightDista nce | 总飞行距离[Km] | double | 总飞行距离[Km] |
| »curFlightTi me | 本次飞行时间 (hh:mm:ss) | string | |
| »uavAlt | 相对地面的高度 | double | 离地高度 |
| »tx | 通信发包数量 | double | |
| »rx | 通信收包数量 | double | |
| »magCaliStat us | 磁罗盘校准状态 | int | 0-未校准 1-校准中 2-校准完成 |
| »lidarForwar dDist | 前视雷达距离[m] | double | |
| »lidarDownwardDist | 下视雷达距离[m] | double | |
| »lidarLeftDi st | 左视雷达距离[m] | double | |
| »lidarRightD ist | 右视雷达距离[m] | double | |
| »lidarBackDi st | 后视雷达距离[m] | double | |
| »lidarForwardState | 前视雷达开关状态 | bool | |
| »lidarDownwardState | 下视雷达开关状态 | bool | |
| »lidarLeftSt ate | 左视雷达开关状态 | bool | |
| »lidarRightS tate | 右视雷达开关状态 | bool | |
| »lidarBackSt ate | 后视雷达开关状态 | bool | |
| »camStatus | 双目相机状态 | int | 0:异常,1:正常 |
| »camDepth | 双目相机距离 | double | 单位 m |
| »windSpeed | 风速 | double | |
| »southWind | 南风 | double | |
| »westWind | 西风 | double | |
| »batterySoc | 电量 | int | 单位:% |
| »deviceModel1 | 载荷类型 1 | string | |
| »deviceModel2 | 载荷类型 2 | string | |
| »hangarID | 降落机库编号(多旋翼) | int | 0-19表示降落的机库编号,-1则表示飞控当前降落位置与飞控已有的机库位置均不相同 |
| »hangarCheckType | 机库校验码类型(多旋翼) | int | 0所有可降机库校验码;1当前降落机库校验码 |
| »hangarInfoMD5 | 机库信息MD5校验码(多旋翼) | string | |
| »routeInfoMD5 | 航线信息MD5校验码(多旋翼) | string | |
| »payloadNotTime | 起飞后载荷未就绪时间(多旋翼) | int | 单位s,0~255 |
| »payloadState | 载荷状态(多旋翼) | int | 0未就绪,1已就绪 |
| »parachuteState | 降落伞状态(多旋翼) | int | 0关,1开 |
| »gcsTeleStatus | 基站状态(多旋翼) | bool | true,正常; |
| »linkTeleStatus | 图传链路状态(多旋翼) | bool | true,正常 |
| »id | 飞控编号 | string | |
| »uavSn | 无人机编号 | String | |
| gimbalInfo | 吊舱遥测信息 | struct | |
| »airLon | 机载经度 | double | |
| »airLat | 机载纬度 | double | |
| »airAlt | 机载高度 | int | |
| »targetLon | 目标经度 | double | |
| »targetLat | 目标纬度 | double | |
| »targetAlt | 目标高度 | int | |
| »globalTrack | 全局跟踪 | int | 1. 跟踪打开 其他-启动跟随 |
| »pointsTack | 定点跟踪 | int | 1. 定点巡视中 2. 路径跟踪中 |
| »currentTrack | 当前跟踪 | int | |
| »framePitch | 框架俯仰 | double | |
| »frameYaw | 框架偏航 | double | |
| »gimbalFOV | FOV | double | |
| »autoPlanFlag | 自主航线飞行计划是否更新标志 | int | 1为更新,0不更新 |
| »autoPlanLat | 吊舱自动航线纬度 | double | |
| »autoPlanLon | 吊舱自动航线经度 | double | |
| »autoPlanAlt | 吊舱自动航线高度 | double | |
| »autoPlanRadius | 吊舱自动航线盘旋半径 | double | |
| »autoPlanDirection | 吊舱自动航线盘旋方向 | int | 1右盘旋,0左盘旋 |
| »autoPlanIndex | 吊舱自动航线当前航点 | int | |
| »autoPlanNextIndex | 吊舱自动航线下一航点 | int |
7.3.1 复合翼apMode飞行状态枚举
| 值 | 飞行状态说明 |
|---|---|
| 0 | 起飞准备 |
| 1 | 待飞 |
| 2 | 姿态安全 |
| 3 | 悬停辅助 |
| 4 | 离地 |
| 5 | 爬升 |
| 6 | 加速 |
| 7 | 垂转平 |
| 8 | 飞行 |
| 9 | 降落 |
| 10 | 减速 |
| 11 | 平转垂 |
| 12 | 末端悬停 |
| 13 | 末端下降 |
| 14 | 迫降 |
| 15 | 丢星迫降 |
| 16 | 半自动 |
| 17 | 进半自动 |
| 18 | 出半自动 |
| 19 | 自动悬停 |
| 20 | 自毁 |
| 21 | 航磁校准 |
| 22 | 攻击模式 |
| 23 | 前视避障 |
| 24 | SDK控制 |
| 25 | 下视避障 |
| 29 | 固定翼高级SDK控制 |
| 30 | 固定翼简单SDK控制 |
| 31 | AHRS降落 |
7.3.2 多旋翼apMode飞行状态枚举
| 值 | 飞行状态说明 |
|---|---|
| 0 | 地面测试 |
| 1 | 待飞 |
| 2 | 姿态安全 |
| 3 | 悬停辅助 |
| 4 | 语音辅助 |
| 5 | 加速 |
| 6 | 加速爬升状态 |
| 7 | 离地 |
| 8 | 爬升 |
| 9 | 飞行 |
| 10 | 降落 |
| 11 | 末端接近 |
| 12 | 初始减速 |
| 13 | 末端悬停 |
| 14 | 末端下降 |
| 15 | ahrs迫降 |
| 16 | 触地状态 |
| 17 | 地面检查状态 |
| 18 | 迫降 |
| 19 | 自动悬停 |
| 20 | 自毁 |
| 21 | 航磁校准 |
| 22 | 攻击 |
| 23 | 前视避障 |
| 24 | SDK控制 |
| 25 | 下视避障 |
| 29 | 侧视避障 |
| 30 | 就地降落 |
c
7.4 复合翼无人机实例数据
json
{
"code": 200,
"data": {
"standardData": {
"apMode": 1,
"assiMode": 2,
"camDepth": -1,
"camStatus": 1,
"curFlightTime": 1,
"deviceModel1": 1,
"deviceModel2": 1,
"flightDistance": 0,
"gpsHeading": 39,
"isConnected": true,
"leftRPM": 0,
"lidarBackDist": 0,
"lidarBackState": true,
"lidarDownwardDist": 6.14,
"lidarDownwardState": true,
"lidarForwardDist": 655.35,
"lidarForwardState": true,
"lidarLeftDist": 0,
"lidarLeftState": true,
"lidarRightDist": 0,
"lidarRightState": true,
"magCaliStatus": 0,
"mainPowerA": 58.24,
"mainPowerV": 58.24,
"navStatus": 3,
"numSV": 9,
"pDOP": 3,
"photoNum": 0,
"posType": 50,
"rPM": 0,
"rightRPM": 0,
"rssiStatus": false,
"rtkDirPosType": "NULL",
"rtkExtSolStat": 0,
"rtkPosType": "NARROW_INT",
"rx": 28,
"sbusStatus": 1,
"singleDualLink": false,
"tAS": 1.01,
"takeOff": true,
"throttle": 0,
"timeStamp": 1712797301000,
"tracker": 0,
"tx": 9,
"uavAlt": 2,
"uavHMSL": 790,
"uavLat": 31.11374426,
"uavLon": 103.75759691,
"uavPitch": 1.17,
"uavRoll": 0.24,
"uavYaw": 39.36,
"vDown": 0.13,
"vEast": 1.12,
"vGnd": 1.43680208,
"vNorth": 0.9,
"warnType": 0,
"westWind": -1.77,
"windSpeed": 1.77,
"uavSn": "ZH20252846214221152"
},
"gimbalInfo": {
"apMode": 1,
"assiMode": 2,
"camDepth": -1,
"camStatus": 1,
"curFlightTime": 1,
"deviceModel1": 1,
"deviceModel2": 1,
"flightDistance": 0,
"gpsHeading": 39,
"isConnected": true,
"leftRPM": 0,
"lidarBackDist": 0,
"lidarBackState": true,
"lidarDownwardDist": 6.14,
"lidarDownwardState": true,
"lidarForwardDist": 655.35,
"lidarForwardState": true,
"lidarLeftDist": 0,
"lidarLeftState": true,
"lidarRightDist": 0,
"lidarRightState": true,
"magCaliStatus": 0,
"mainPowerA": 58.24,
"mainPowerV": 58.24,
"navStatus": 3,
"numSV": 9,
"pDOP": 3,
"photoNum": 0,
"posType": 50,
"rPM": 0,
"rightRPM": 0,
"rssiStatus": false,
"rtkDirPosType": "NULL",
"rtkExtSolStat": 0,
"rtkPosType": "NARROW_INT",
"rx": 28,
"sbusStatus": 1,
"singleDualLink": false,
"tAS": 1.01,
"takeOff": true,
"throttle": 0,
"timeStamp": 1712797301000,
"tracker": 0,
"tx": 9,
"uavAlt": 2,
"uavHMSL": 790,
"uavLat": 31.11374426,
"uavLon": 103.75759691,
"uavPitch": 1.17,
"uavRoll": 0.24,
"uavYaw": 39.36,
"vDown": 0.13,
"vEast": 1.12,
"vGnd": 1.43680208,
"vNorth": 0.9,
"warnType": 0,
"westWind": -1.77,
"windSpeed": 1.77
}
},
"id": "12230037",
"type": "response"
}7.5 多旋翼无人机实例数据
json
{
"code": "200",
"data": {
"standardData": {
"dirPosType": 50,
"magCaliStatus": 0,
"takeOff": true,
"tx": 10,
"pDOP": 1,
"lmtStatusFlyStatusName": "正常飞行",
"rtkFlag": 0,
"camDepth": -1,
"rtkDirPosType": "NARROW_INT",
"linkTeleStatus": false,
"vEast": 0,
"posType": 50,
"uavYaw": 315.85444372186635,
"rtkExtSolStat": 1,
"rssiStatus": false,
"joystickState": 0,
"curFlightTime": "0:0:0",
"southWind": 52.86,
"windSpeed": 52.86,
"lmtStatusFlyStatus": 0,
"westWind": 0,
"lidarLeftState": false,
"vehicleType": "",
"assiMode": 2,
"camStatus": 1,
"lidarDownwardState": false,
"payloadNotTime": 0,
"escStatus": false,
"fenceSwitchState": 0,
"leftRPM": 0,
"mainPowerA": 51.94,
"singleDualLink": false,
"apMode": 1,
"tAS": 0,
"vDown": 0,
"rtkPosType": "NARROW_INT_RTK",
"lidarForwardDist": 655.35,
"numSV": 29,
"vGnd": 0,
"uavLon": 104.18319855,
"apModeName": "待飞",
"lidarRightDist": 655.35,
"hangarID": 0,
"lidarRightState": false,
"isConnectedPing": 1,
"lidarBackState": false,
"lidarBackDist": 655.35,
"throttle": 0,
"edgeCommState": 1,
"rx": 65,
"sbusStatus": 3,
"warnType": 0,
"isConnected": true,
"airSpeedCmd": 0,
"globalStatus": 1,
"hangarInfoMD5": "0000000000000000",
"parachuteState": 0,
"rightRPM": 0,
"uavHMSL": 526.867,
"tracker": 0,
"mainPowerV": 47.26,
"routeInfoMD5": "0000000000000000",
"uavLat": 30.52059314,
"lidarLeftDist": 655.34,
"payloadState": 0,
"uavRoll": -1.40947617602226,
"lidarUpState": false,
"uavAlt": 24.867,
"gnssHeading": 317,
"uavPitch": -0.42398876839694,
"rPM": 0,
"flightDistance": 0,
"lidarDownwardDist": 4.6,
"timeStamp": 1753338497263,
"vNorth": 0,
"gcsTeleStatus": true,
"addressName": "中国四川省成都市双流区",
"hangarCheckType": 0,
"lidarUpDist": 655.35,
"lidarForwardState": false,
"navStatus": 4,
"photoNum": 0,
"uavSn": "ZH20252846214221152"
},
"gimbalInfo": {
"apMode": 1,
"assiMode": 2,
"camDepth": -1,
"camStatus": 1,
"curFlightTime": 1,
"deviceModel1": 1,
"deviceModel2": 1,
"flightDistance": 0,
"gpsHeading": 39,
"isConnected": true,
"leftRPM": 0,
"lidarBackDist": 0,
"lidarBackState": true,
"lidarDownwardDist": 6.14,
"lidarDownwardState": true,
"lidarForwardDist": 655.35,
"lidarForwardState": true,
"lidarLeftDist": 0,
"lidarLeftState": true,
"lidarRightDist": 0,
"lidarRightState": true,
"magCaliStatus": 0,
"mainPowerA": 58.24,
"mainPowerV": 58.24,
"navStatus": 3,
"numSV": 9,
"pDOP": 3,
"photoNum": 0,
"posType": 50,
"rPM": 0,
"rightRPM": 0,
"rssiStatus": false,
"rtkDirPosType": "NULL",
"rtkExtSolStat": 0,
"rtkPosType": "NARROW_INT",
"rx": 28,
"sbusStatus": 1,
"singleDualLink": false,
"tAS": 1.01,
"takeOff": true,
"throttle": 0,
"timeStamp": 1712797301000,
"tracker": 0,
"tx": 9,
"uavAlt": 2,
"uavHMSL": 790,
"uavLat": 31.11374426,
"uavLon": 103.75759691,
"uavPitch": 1.17,
"uavRoll": 0.24,
"uavYaw": 39.36,
"vDown": 0.13,
"vEast": 1.12,
"vGnd": 1.43680208,
"vNorth": 0.9,
"warnType": 0,
"westWind": -1.77,
"windSpeed": 1.77
}
},
"id": "12230037",
"type": "response"
}**8.**飞前自检上报结果
8.1 通信方式:MQTT
8.2 主题:/mission/planPreparation
8.3 协议内容
| 参数名称 | 类型 | 参数说明 |
|---|---|---|
| environmentInspect | JSONObject | 环境检测 |
| checkStatus | integer | 检测状态 0:失败;1:成功;2:进行中 |
| itemCode | string | 步骤名称 |
| itemName | string | 步骤中文描述 |
| subInspectNoticeInfoList | array | 环境检测子检测项 |
| checkStatus | integer | 检测状态 0:失败;1:成功;2:进行中 |
| itemCode | string | 步骤名称 |
| itemName | string | 步骤中文描述 |
| msg | string | 失败原因 |
| expireTime | integer(int64) | 起飞剩余时间,单位秒 |
| isSendTakeOff | boolean | 是否已起飞 |
| mcuInspect | SingleExecuteNoticeInfoDTO | MCU检测 |
| checkStatus | integer | 检测状态 0:失败;1:成功;2:进行中 |
| itemCode | string | 步骤名称 |
| itemName | string | 步骤中文描述 |
| subInspectNoticeInfoList | array | MCU检测子检测项 |
| checkStatus | integer | 检测状态 0:失败;1:成功;2:进行中 |
| itemCode | string | 步骤名称 |
| itemName | string | 步骤中文描述 |
| msg | string | 失败原因 |
| nxInspect | SingleExecuteNoticeInfoDTO | SingleExecuteNoticeInfoDTO |
| checkStatus | integer | 检测状态 0:失败;1:成功;2:进行中 |
| itemCode | string | 步骤名称 |
| itemName | string | 步骤中文描述 |
| subInspectNoticeInfoList | array | |
| checkStatus | integer | 检测状态 0:失败;1:成功;2:进行中 |
| itemCode | string | 步骤名称 |
| itemName | string | 步骤中文描述 |
| msg | string | 失败原因 |
| planNo | string | 计划编号 |
| msg | string | |
| success | boolean |
8.4 示例数据
json
{
"expireTime": 1682,
"nxInspect": {
"checkStatus": 1,
"itemName": "飞行服务系统检测",
"itemCode": "nxInspect",
"subInspectNoticeInfoList": [
{
"checkStatus": 1,
"itemName": "视觉导航",
"itemCode": "isVisualNavigationOK"
},
{
"checkStatus": 1,
"itemName": "单目摄像头",
"itemCode": "isSingleCameraOK"
},
{
"checkStatus": 1,
"itemName": "载荷检查",
"itemCode": "isLoadOk"
},
{
"checkStatus": 1,
"itemName": "双目摄像头",
"itemCode": "isBinocularCameraOk"
},
{
"checkStatus": 1,
"itemName": "NxTx运行",
"itemCode": "isNxTxRun"
},
{
"checkStatus": 1,
"itemName": "中继检查",
"itemCode": "isRelayOk"
},
{
"checkStatus": 1,
"itemName": "同步航线",
"itemCode": "isRouteOk"
},
{
"checkStatus": 1,
"itemName": "精准降落",
"itemCode": "isVplOK"
},
{
"checkStatus": 1,
"itemName": "保险检查",
"itemCode": "isInsuranceOk"
}
]
},
"planNo": "PLAN202506031633537481",
"isSendTakeOff": true,
"environmentInspect": {
"checkStatus": 1,
"itemName": "环境检测",
"itemCode": "environmentInspect",
"subInspectNoticeInfoList": [
{
"msg": "",
"checkStatus": 1,
"itemName": "环境检测",
"itemCode": "environmentInspect"
}
]
},
"mcuInspect": {
"checkStatus": 1,
"itemName": "飞行控制系统检测",
"itemCode": "mcuInspect",
"subInspectNoticeInfoList": [
{
"checkStatus": 1,
"itemName": "RTK定位",
"itemCode": "isRtkFix"
},
{
"checkStatus": 1,
"itemName": "动力检查",
"itemCode": "isPumpOK"
},
{
"checkStatus": 1,
"itemName": "IMU检查",
"itemCode": "isImuOK"
},
{
"checkStatus": 1,
"itemName": "降落伞检查",
"itemCode": "isParachuteOk"
},
{
"checkStatus": 1,
"itemName": "同步机库信息",
"itemCode": "isHangarInfoOk"
},
{
"checkStatus": 1,
"itemName": "差分误差",
"itemCode": "isGpsFix"
},
{
"checkStatus": 1,
"itemName": "差分偏差",
"itemCode": "isGpsHeadingFix"
},
{
"checkStatus": 1,
"itemName": "预检展开",
"itemCode": "isHangarInspectOK"
},
{
"checkStatus": 1,
"itemName": "RTK定向",
"itemCode": "isRtkHeadingFix"
}
]
}
}**9.**起飞指令结果通知
9.1 通信方式:MQTT
9.2 主题:/mission/hangarAck
9.3 协议内容
| 字段 | 内容 | 类型 | 备注 |
|---|---|---|---|
| planNo | 计划编号 | string | |
| uvaTakeOff | 状态 | string | success 成功 fail 失败 |
| reason | 失败原因 | string |
9.4 示例数据
json
{
"siteSn": "1001",
"uvaTakeOff": "success",
"reason": "风速异常",
"planNo": "PLAN001"
}10. 起飞成功通知
10.1 通信方式:MQTT
10.2 主题:/mission/takeOff
10.3 协议内容
| 序号 | 字段 | 内容 | 类型 | 备注 |
|---|---|---|---|---|
| 1. | planNo | 计划编号 | string | |
| 2. | pilotId | 飞控编号 | string |
10.4 示例数据
json
{
"pilotId": "1001",
"planNo": "PLAN001"
}11. 降落成功通知
11.1 通信方式:MQTT
11.2 主题:/mission/recordEnd
11.3 协议内容
| 字段 | 内容 | 类型 | 备注 |
|---|---|---|---|
| planNo | 计划编号 | string | |
| pilotId | 飞控编号 | string |
11.4 示例数据
json
{
"pilotId": "1001",
"planNo": "PLAN001"
}12. 数据回传完成通知
12.1 通信方式:MQTT
12.2 主题:/mission/backhaulEnd
12.3 协议内容
| 字段 | 类型 | 描述 |
|---|---|---|
| progressState | int | 当前数据状态:1:下载数据,2:回传数据,3:回传完成 |
| fileType | string | 数据类型 |
| taskId | string | 任务架次编号 |
12.4 fileType字段表
| 字段 | 类型 | 描述 |
|---|---|---|
| image_sony | string | 单拼相机照片 |
| image_five | string | 五拼相机照片 |
| video | string | 吊舱视频 |
| lidar | string | 雷达数据 |
| pos | string | 照片pos数据 |
| pps_gcs1000 | string | 基站PPS数据 |
12.5 示例数据
json
{
"progressState": 3,
"fileType": "image_sony",
"taskId": "PLAN202505221803071191_4"
}13. 数据回传文件上传通知
13.1 通信方式:MQTT
13.2 主题:/mission/setFileUploadResult
13.3 协议内容
服务主动上报:每回传一个文件都会返回
| 字段 | 类型 | 描述 |
|---|---|---|
| isSucceed | int | 结果:0成功,1下载失败,2上传失败 |
| fileSize | int | 该文件字节大小 |
| failedFilePath | string | 上传失败的文件的机载绝对路径 |
| taskId | string | 任务架次编号 |
| url | string | 上传文件后返回的地址 |
| type | string | 文件类型(参考13.4 fileType字段表) |
13.4 示例数据
json
{
"failedFilePath": "",
"fileSize": 20004147,
"isSucceed": 0,
"taskId": "PLAN202510210932178160_3",
"type": "image_sony",
"url": "http://117.173.242.208:9000/jocloud/PLAN202510210932178160_3/image_sony/DSC03480.JPG"
}14. 实时隐患信息通知
14.1 通信方式:MQTT
14.2 主题:/{机库编号}/cloud/warningInfo
14.3 协议内容
| 字段 | 类型 | 描述 |
|---|---|---|
| autopilotSn | String | 飞控编号 |
| planNo | String | 任务编号 |
| recordNo | String | 架次编号 |
| file | String | 快照base64格式文件 |
| warningInfo | Array | 隐患信息 |
| >warningLevel | Integer | 警戒区等级 |
| >identifyType | Integer | 识别目标类型枚举 |
| > reliability | Double | 识别置信度 |
| >wargetPosition | Double Array | 目标经纬高 |
| >pixelPosition | Double array | 隐患像素框信息 |
14.4 示例数据
json
{
"autopilotSn": "18610001",
"planNo": "PLAN2025121136521",
"recordNo": "PLAN2025121136521_1",
" file ": " data:image/jpg;base64,iVBORw0KGgoAAAANSUhEUgAABANSUhEUgAABhAAAAOWCAYAhAAAAOWCAYAAAAOR9h6A ",
"warningInfo": [
{
"identifyType": 0,
"pixelPosition": [1032, 648, 15, 36],
"reliability": 0.6480316519737244,
"wargetPosition": [128.01093592789866, 43.5796615898956, 588],
"warningLevel": 0
}
]
}14.5 识别类型枚举值
类别值 目标 是否支持
0 person(人) √
1 auto(车) √
2 boat(船) √
3 fire(火) √
4 buoy(浮标) √
5 fish(鱼) √
9 building(房屋) √
10 smoke(烟雾) √
11 greenhouse(大棚) √
12 tower(杆塔) √
15.错误码
| 错误码 | 错误码描述 |
|---|---|
| 200 | 操作成功 |
| 300001 | 操作失败 |
| 400 | 响应失败 |
| 300003 | 权限不足 |
| 300004 | 重复操作 |
| 300005 | 撤销失败 |
| 300006 | 无效链接 |
| 300007 | 文件上传失败 |
| 300008 | 文件不能为空 |
| 300009 | 格式错误 |
| 300010 | 参数异常 |
| 300011 | 数据不存在 |
| 300012 | 文件类型错误 |
| 300013 | 无效数据 |
| 300014 | 文件异常 |
| 300015 | 此申请已审批 |
| 300016 | 驳回原因不能为空 |
| 300017 | 操作失败 |
| 300018 | 没有数据 |
| 300019 | 名称已存在 |
| 300020 | 删除失败,存在关联的数据! |
| 300021 | 数据已经存在 |
| 300022 | 操作异常 |
| 300023 | 数据内容不能为空 |
| 300024 | 结果为空 |
| 300025 | 日期异常 |
| 300026 | 当前不支持此类型 |
| 300027 | 设备不在线 |
| 300028 | 请勿重复点击 |
| 300029 | 边应用服务编码不存在 |
| 300030 | 控制指令超时,请重试! |
| 300031 | 控制指令失败,请重试! |
| 301001 | token过期 |
| 301002 | 用户不存在 |
| 301003 | 用户名或密码错误 |
| 301004 | 企业已禁用 |
| 301005 | 组织名称已存在 |
| 301006 | 未加入企业 |
| 301007 | 组织不存在 |
| 301008 | 企业已存在 |
| 301009 | 企业已通过审批 |
| 301010 | 您有加入其他企业申请处于认证中 |
| 301011 | 您已加入其他企业 |
| 301012 | 申请不存在 |
| 301013 | 邮箱绑定异常 |
| 301014 | 角色无效 |
| 301015 | 组织无效 |
| 301016 | 请选择所属企业 |
| 301017 | 用户名已存在 |
| 301018 | 验证码错误 |
| 301019 | 您已绑定其他邮箱 |
| 301020 | 原邮箱未进行验证 |
| 301021 | 邮箱已被绑定 |
| 301022 | 原手机未进行验证 |
| 301023 | 手机已被绑定 |
| 301024 | 请设置更高难度的密码 |
| 301025 | 密码错误 |
| 301026 | 手机号或邮箱号不能都为空 |
| 301027 | 未加入组织 |
| 301028 | 请求失败,key校验失败 |
| 302001 | 菜单名或菜单标识已存在 |
| 302002 | 父节点仅支持选择菜单类型 |
| 302003 | 插件不存在 |
| 302004 | 插件未使用 |
| 302005 | 角色已存在 |
| 302006 | 角色不存在 |
| 302007 | 无效用户 |
| 302008 | 数据存在子项不可删除 |
| 303101 | 流的数量已达到上限 |
| 304001 | 固件版本已存在 |
| 304002 | 版本格式不支持 |
| 304003 | 固件版本不存在 |
| 304004 | 当前固件已经是最新版本 |
| 305001 | 账号已存在 |
| 305002 | 编辑失败 |
| 305003 | 账号不可编辑 |
| 305004 | 账号已存在 |
| 305005 | 删除失败 |
| 305006 | 采集时间错误 |
| 305007 | cors账号资源不足 |
| 305008 | 任务类型不支持 |
| 305009 | 任务状态不符合 |
| 305010 | txt地址为空 |
| 305011 | csv地址为空 |
| 305012 | 存在运行中的订单 |
| 305013 | 采集点列表为空 |
| 306001 | 任务不存在 |
| 306002 | 当前任务状态不支持上传文件 |
| 306003 | 移动站数据为空 |
| 306004 | 基站数据为空 |
| 306005 | 基站数据获取方式为空 |
| 306006 | 任务创建失败 |
| 306007 | dat文件不存在 |
| 306008 | 重新解算失败 |
| 306009 | CORS文件不存在 |
| 306010 | CRS参数为空 |
| 306011 | 惯导数据不能为空 |
| 306012 | 雷达配置文件不能为空 |
| 306013 | 姿态文件不能为空 |
| 306014 | json配置文件不能为空 |
| 307001 | 上传失败 |
| 307002 | 分片上传异常 |
| 308001 | 操作失败,无法撤销已审核申请 |
| 308002 | 操作失败,无法编辑已通过申请 |
| 309001 | 域ID已存在 |
| 309002 | 电子围栏不存在 |
| 309003 | 无人机不在线 |
| 309004 | 需先加入组织 |
| 309005 | 当前飞控程序更新中 |
| 309006 | 当前计划关联站点存在进行中的计划 |
| 309007 | 检查正在进行或已经完成 |
| 309008 | 无人机型号或载荷型号不存在 |
| 309009 | home点不能为空 |
| 309010 | 辅助航线类型不存在 |
| 309011 | 计划下不存在航线 |
| 309012 | 计划设备不存在 |
| 309013 | 暂无当前连接无人机权限 |
| 309014 | 无人机存在正在执行任务,暂时无法同步航线 |
| 309015 | 将航线写入文件失败 |
| 309016 | 站点不存在 |
| 309017 | 无人机存在正在执行任务,暂时无法进行云监控 |
| 309018 | 计划处于执行中 |
| 309019 | 时间已过,请修改定时时间 |
| 309020 | 载荷为相机时必须设置拍照模式 |
| 309021 | 指派用户失败 |
| 309022 | 起飞站点现在没有在线的飞机 |
| 309023 | 起飞站点存在在线的飞机,但该飞机不属于云平台 |
| 309024 | 起飞站点存在在线的飞机,但该飞机不属于当前任务选择的无人机型号 |
| 309025 | 设备参数未录入 |
| 309026 | 传感器参数未录入,无法计算 |
| 309027 | 创建传感器失败 |
| 309028 | 设置传感器参数失败 |
| 309029 | 计算地面分辨率失败 |
| 309030 | 计算旁向间隔失败 |
| 309031 | 计算传感器相对航高失败 |
| 309032 | 特殊类型任务暂不支持修改 |
| 309033 | 隐患已重点关注 |
| 309034 | 高程检查失败 |
| 309035 | 告警已被处理 |
| 309036 | 当前计划关联基站存在进行中的计划 |
| 309037 | 开始自检失败 |
| 309038 | 禁飞区检查失败 |
| 309039 | 降落航线生成失败 |
| 309040 | 站点未创建应急任务 |
| 309041 | 快速应急航线生成失败 |
| 309042 | 设置定时任务和任务关联缓存失败 |
| 309043 | 无人机剩余电量过低 |
| 309044 | 当前计划航线与正在执行的计划存在航线碰撞风险 |
| 309045 | 删除计划失败,应急任务无法删除 |
| 309046 | 航线高度检查失败 |
| 309047 | 设备不在线,上传喊话音频文件失败 |
| 309048 | 上传喊话音频文件失败 |
| 309049 | 火点附近暂无符合条件机库 |
| 309050 | 获取大疆手动任务异常 |
| 310001 | 操作失败,类型详情处于锁定状态 |
| 310002 | 提交失败,消息类型详情异常! |
| 310003 | 提交失败,推送时间错误! |
| 310004 | 撤销失败,该消息无法撤销 |
| 310005 | 删除失败,该消息无法删除 |
| 311001 | 机库不在线 |
| 311002 | 起飞失败,请确保飞前准备ok |
| 311003 | 起飞失败,飞前检查状态已过期 |
| 311004 | 起飞站点现在没有在线的飞机 |
| 311005 | 起飞机库未处于待机状态,请前往机库详情页处理 |
| 311006 | 起降机库均未处于待机状态,请前往机库详情页处理 |
| 311007 | 起降机库均未处于待机状态,请前往机库详情页处理 |
| 311008 | 起飞失败,请确保降落航线ok |
| 311009 | 机库开始入库预检展开失败 |
| 311010 | 获取自动入库状态异常 |
| 311011 | 正在下载机载数据 |
| 311012 | 起飞机库离线 |
| 311013 | 降落机库离线 |
| 311014 | 起飞的机库存在异常,请检查 |
| 311015 | 降落机库存在异常存在异常,请检查 |
| 311016 | 机库未连接飞机 |
| 311017 | 已通知机库启用服务 |
| 311018 | 已通知机库关闭服务 |
| 311019 | 起飞失败,机库未处于待飞状态 |
| 312101 | 推流数量已达到上限 |
| 312102 | 平台名称已存在 |
| 312103 | 平台ID已存在 |
| 312104 | 平台服务器地址已存在 |
| 312105 | 平台不存在 |
| 312106 | 该无人机已关联推流地址,请重新选择 |
| 312107 | 平台ID异常 |
| 312108 | 关联不存在 |
| 312109 | 该平台已被绑定推流地址,请删除推流地址后再进行删除操作。 |
| 312110 | 该推流正在进行,请推流停止后再操作 |
| 313001 | 架次不存在 |
| 313002 | 站点不在线 |
| 313003 | 该操作只本地MQTT支持 |
| 313004 | 计划不存在 |
| 313005 | 起飞失败,请先进行飞前准备 |
| 313006 | 起飞失败,任务正在执行中或已经结束 |
| 313007 | 指令发送失败,无人机正在起飞中 |
| 313008 | 起飞失败,飞前检查状态已过期 |
| 313009 | 起飞失败,未做降落计划 |
| 313010 | 向地面站请求授权中 |
| 313011 | 如需调整航线,请联系任务指派人进行调整 |
| 313012 | 操作失败,当前阶段不允许该操作 |
| 313013 | 任务不在飞前准备阶段 |
| 313014 | 请重新开始飞前准备 |
| 313015 | 不可越级更新状态 |
| 313016 | 视频流不存在 |
| 313017 | 录制失败 |
| 313018 | 操作类型异常,操作失败! |
| 313019 | 视频未处于录制中! |
| 313020 | 当前请求回放服务较多,请稍后再试! |
| 313021 | 起飞失败,雨量过大 |
| 313022 | 起飞失败,风向检测失败 |
| 313023 | 未找到选定的原始推流 |
| 313024 | 指令发送失败,载荷不在线 |
| 313025 | 当前数据需与架次绑定,地面不支持该功能 |
| 313026 | 起飞失败,风速检测失败 |
| 313027 | 无人机正在飞行中 |
| 314001 | 飞控编号存在特殊符号 |
| 314002 | 无人机编号存在特殊符号 |
| 314003 | 飞控编号已经存在 |
| 314004 | 无人机编号已经存在 |
| 314005 | 类别Id异常 |
| 314006 | 型号id异常 |
| 314007 | 地理位置信息异常 |
| 314008 | 飞行平台不存在 |
| 314009 | 飞行平台正在执行 |
| 314010 | 飞行平台在线 |
| 314011 | 飞行平台离线 |
| 314012 | 固件信息获取失败 |
| 314013 | 载荷编号存在特殊符号 |
| 314014 | 载荷已存在 |
| 314015 | 载荷不存在 |
| 314016 | 型号已存在 |
| 314017 | 类别已存在 |
| 314018 | 父型号不存在 |
| 314019 | 起飞站点不存在 |
| 314020 | 降落站点不存在 |
| 314021 | 设备参数已存在 |
| 314022 | 站点编号存在特殊符号 |
| 314023 | 站点编号已存在 |
| 314024 | 站点名称已存在 |
| 314025 | 站点不存在 |
| 314026 | 无法删除在线站点 |
| 314027 | 站点型号与无人机型号无关联 |
| 314028 | 载荷类型不存在 |
| 314029 | 无法编辑正在执行任务站点 |
| 314030 | 无人机型号与载荷型号无关联 |
| 314031 | 起降站点型号不一致 |
| 314032 | 无人机不在RTK1.0状态,无法获取准确定位 |
| 314033 | 主控正在执行任务 |
| 314034 | 未识别当前版本 |
| 314035 | 同类型包正在更新,请稍等 |
| 314036 | 关联基站存在错误 |
| 314037 | 缺少MAC地址 |
| 314038 | 载荷mac地址已存在 |
| 314039 | 当前版本站点只允许完整包升级 |
| 314040 | 删除设备请先作废保单 |
| 314041 | 无人机不在定位1.0状态,无法获取准确定位 |
| 314042 | 获取主控主备降点位置信息异常 |
| 315001 | 生成报告失败,该架次没有隐患数据 |
| 315002 | 该架次没有生成隐患报告 |
| 315003 | 模版文件同名已存在 |
| 315004 | 架次数据不存在 |
| 315005 | KML已与计划关联 |
| 315006 | 正射照片不存在 |
| 315007 | 架次存在正在执行的隐患识别任务 |
| 315008 | 架次存在正在执行的异常识别任务 |
| 315009 | 参考架次号不能与分析架次号相同 |
| 315010 | 点云已转换 |
| 315011 | 该类型不支持下载 |
| 315012 | 该类型不支持转换 |
| 315013 | 格式化失败,索尼回传服务正在下载照片 |
| 315014 | 索尼相机格式化失败 |
| 315015 | 该架次未搭载对应载荷,数据不存在 |
| 317001 | 云空间容量不足 |
| 317002 | 云建模GP不足 |
| 318001 | 视频已开始拼接 |
| 318002 | 视场角锁定失败 |
| 318003 | 框架角锁定失败 |
| 318004 | 拼接失败 |
| 318005 | 保存失败 |
| 318006 | 未找到驱动,请重新开启拼图 |
| 318007 | 获取拼接状态失败 |
| 318008 | 结束拼图驱动失败 |
| 319001 | 建模任务不存在 |
| 319002 | 该架次无有效照片数据 |
| 319003 | 无POS数据 |
| 319004 | 照片数量与POS中的照片数量不相同 |
| 319005 | 上传POS地址为空 |
| 319006 | POS文件生成失败 |
| 319007 | 无法判断模型类型 |
| 319008 | 建模产品列表为空 |
| 319009 | 不存在该任务状态 |
| 319010 | 访问建模服务错误 |
| 319011 | 建模服务返回解析失败 |